MSFSのボーイング747を改良してくれるフリーのアドオン「Salty」を使った、ボーイング747の着陸手順を解説します。FMCを入力し、コース、速度、高度を自動でコントロールしてくれるVNAV、LNAV、着陸支援システムのILSを使って関西空港へ着陸します。
※着陸だけを楽しみたい初心者向けの手順となりますので、実際の航路や高度、手順とは異なります。
<お知らせ>2025年3月のAIRAC(航空情報)更新に合わせて、着陸コースを更新しました。操作、画面が異なる場合はコメントいただけると幸いです。
目次
- 1.ジャンボジェット(B747)を着陸させよう
- 2.Saltyの導入
- 3.フライトの作成
- 4.FMCの入力とオートパイロット設定
- 5.オートパイロットに従って飛行開始
- 6.降下準備
- 7.降下
- 8.最終着陸態勢に向けて
- 9.ILSをキャプチャ
- 10.手動操縦に切り替え
- 11.着陸
- 12.手動での着陸にチャレンジ
- 13.最後に
1.ジャンボジェット(B747)を着陸させよう
MSFSにはデフォルトでボーイング747が収録されています。国内、世界でも見ることが少なくなったジャンボジェットです。機体が大きくて迫力がありますが、その分操縦も難しく、はるか上空からピンポイントで滑走路へ着陸することは難しいです。VNAV、LNAV、ILSといった航法支援システムと自動操縦(オートパイロット、オートスロットル)を使って着陸させてみましょう。※時間をかけずに着陸を楽しみたい方向けです。
※A320neoの着陸手順はこちら
2.Saltyの導入
デフォルトで収録されているB747-8の様々なバグを解消してくれたり、機能を追加してくれるフリーのアドオンがSalty747です。
Salty747のインストール
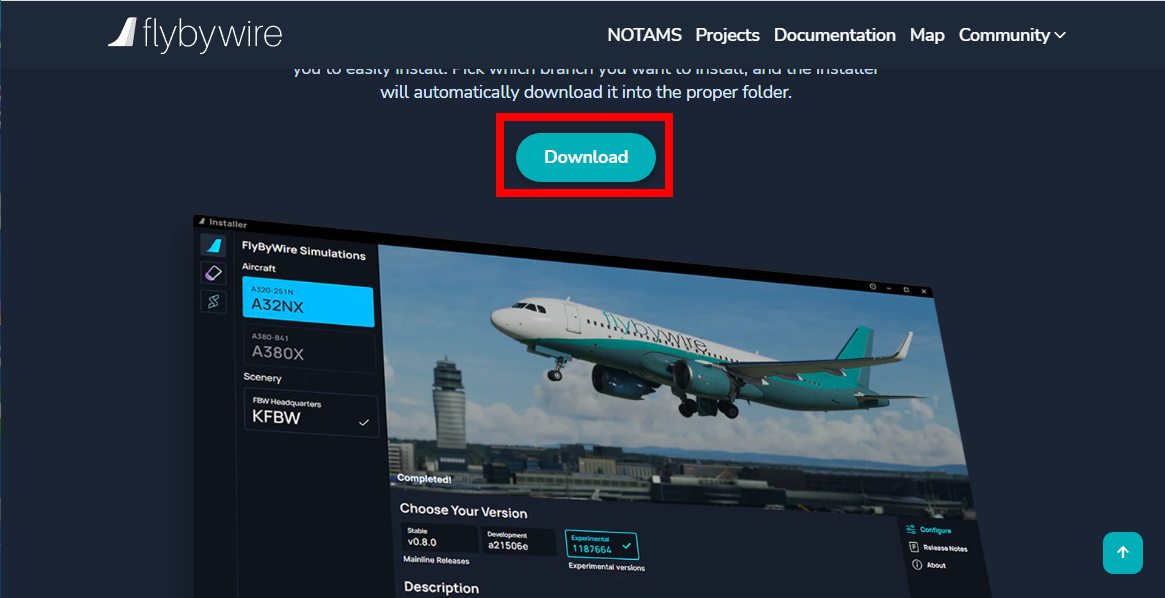
インストール方法は、こちらのページから「flybywireのインストーラ」をダウンロード、インストールします。flybywireはA32NXやFSLTLを公開しているので、これらを使っていて、インストーラを導入済みであればインストール不要です。

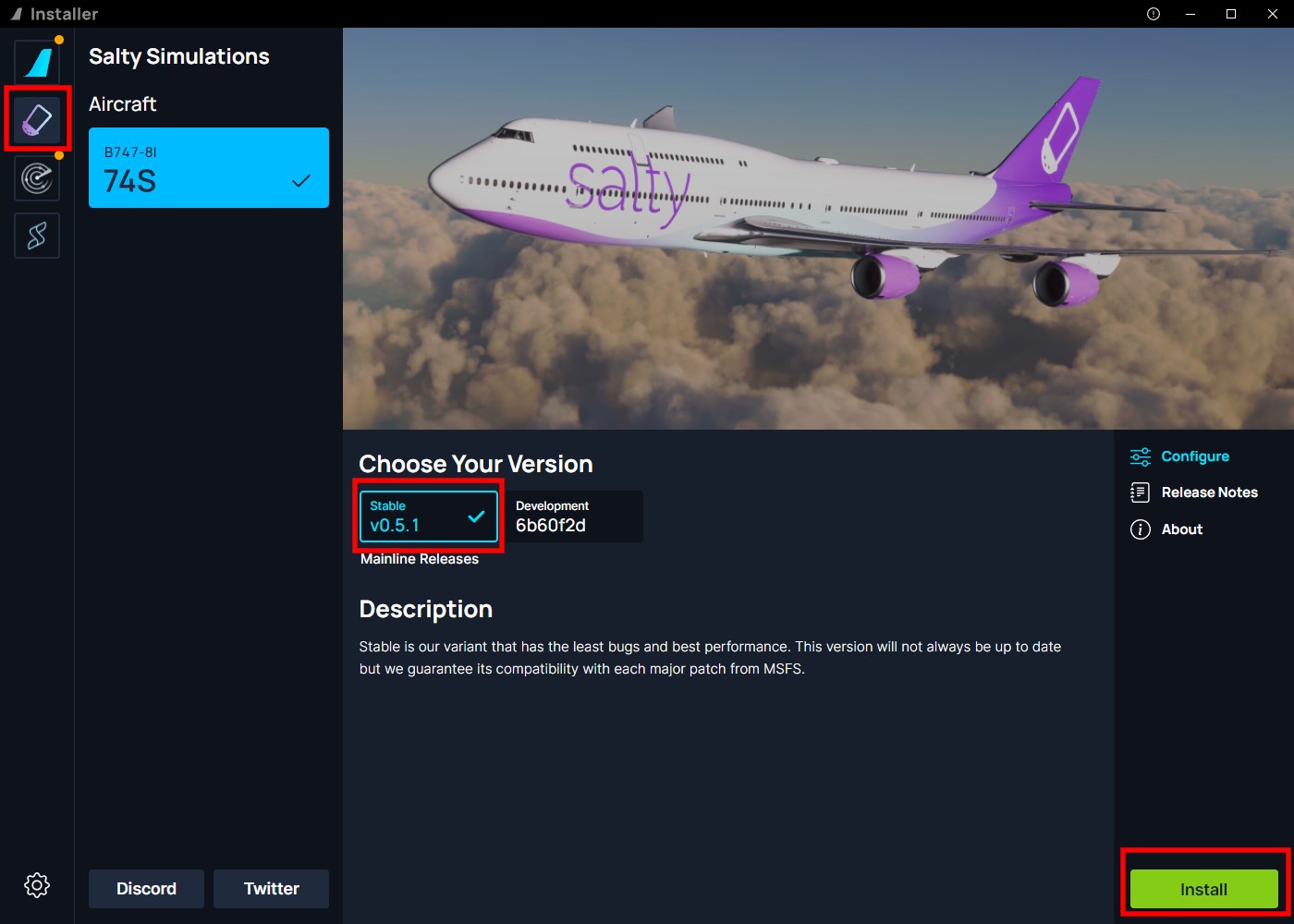
flybiwireのインストーラが起動したら、左側の上から2つ目のアイコンを選択してSalty747をインストールします。Stable(安定版)を選びましょう。
機体の選択
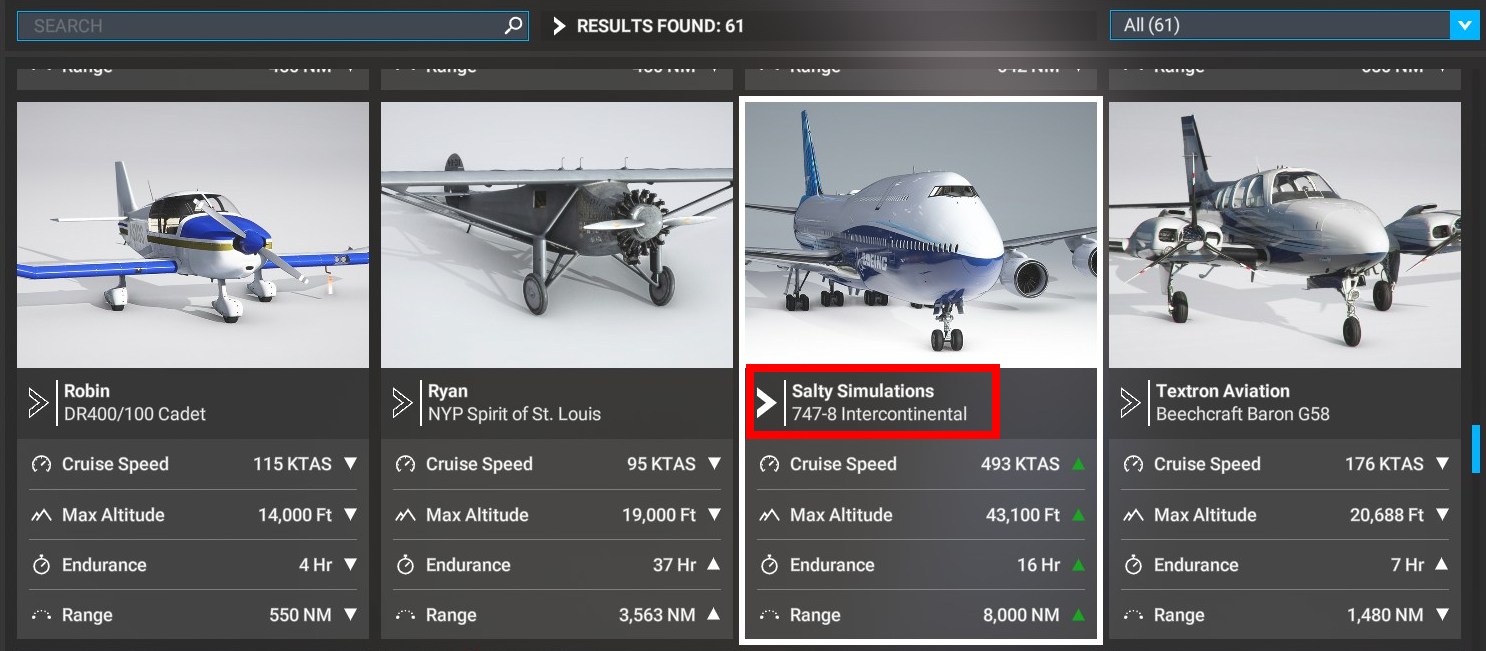
MSFSの機体の選択画面ですが、デフォルトのB747とは別ですので注意しましょう。リペイントもFlightsim.toで「Salty Simulations B747-8用のリペイント」が多く公開されていますので、そちらを使用します。
3.フライトの作成
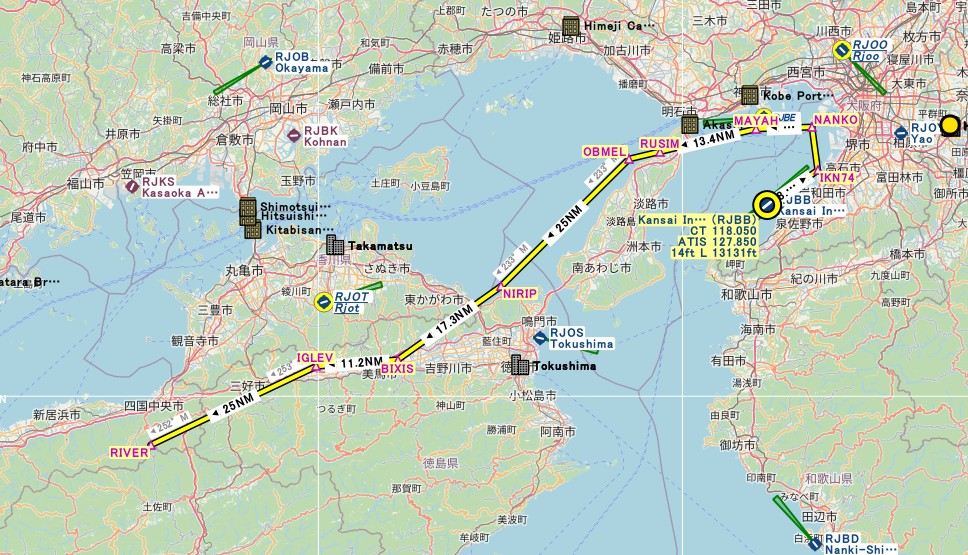
着陸コースはこちらのとおりです。四国の中央北部にある四国中央市上空からフライトを初めて、徳島、淡路島西側、神戸空港の南を飛行します。最後は大阪湾を旋回しながら高度を下げて関西国際空港の滑走路24Lへ着陸します。少し難しいコースですが、大阪湾を旋回する着陸は実際にも使われているコースです。
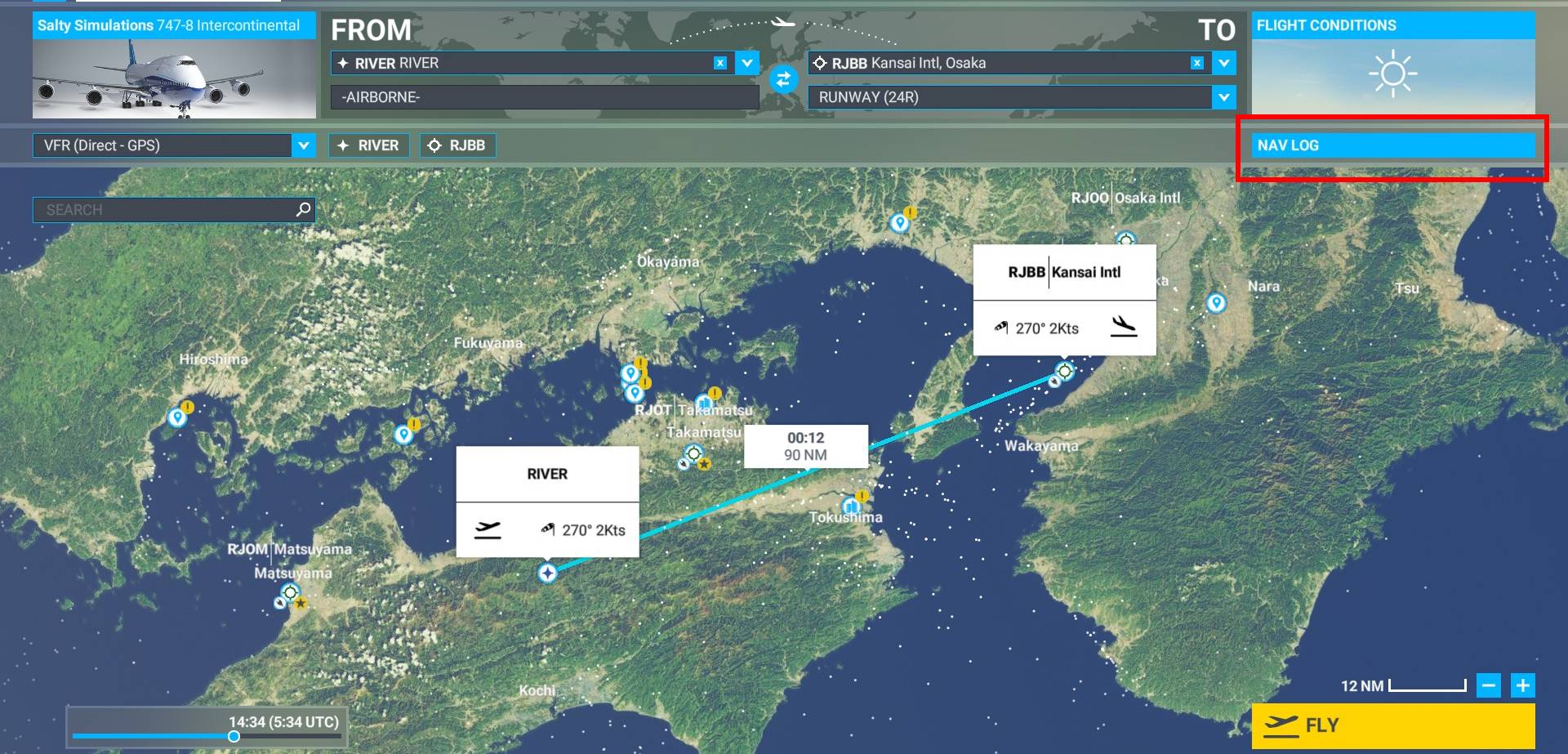
機体でSaltyの747-8を選択したら、目的地の「RJBB|Osaka Intl」(関西空港)を左クリックで選択して「SET AS ARRIVAL」を選択します。

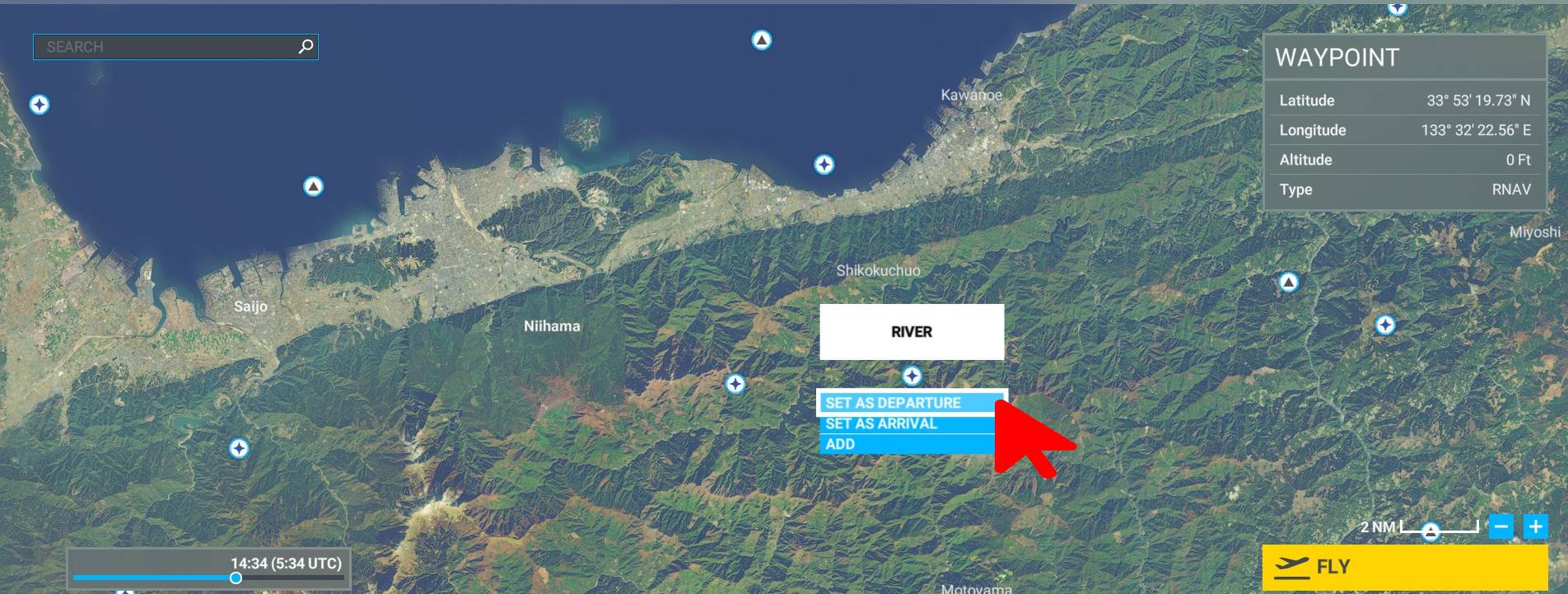
続いて、出発点ですが四国、四国中央の南部にあるRIVERというWayポイントを左クリックで選択して「SET AS DEPATURE」を選択します。※見つからなければだいたいでOKです。
以下のように直線の経路が設定できたら、飛行開始時の高度を設定します。右上の「NAV LOG」を選択します。
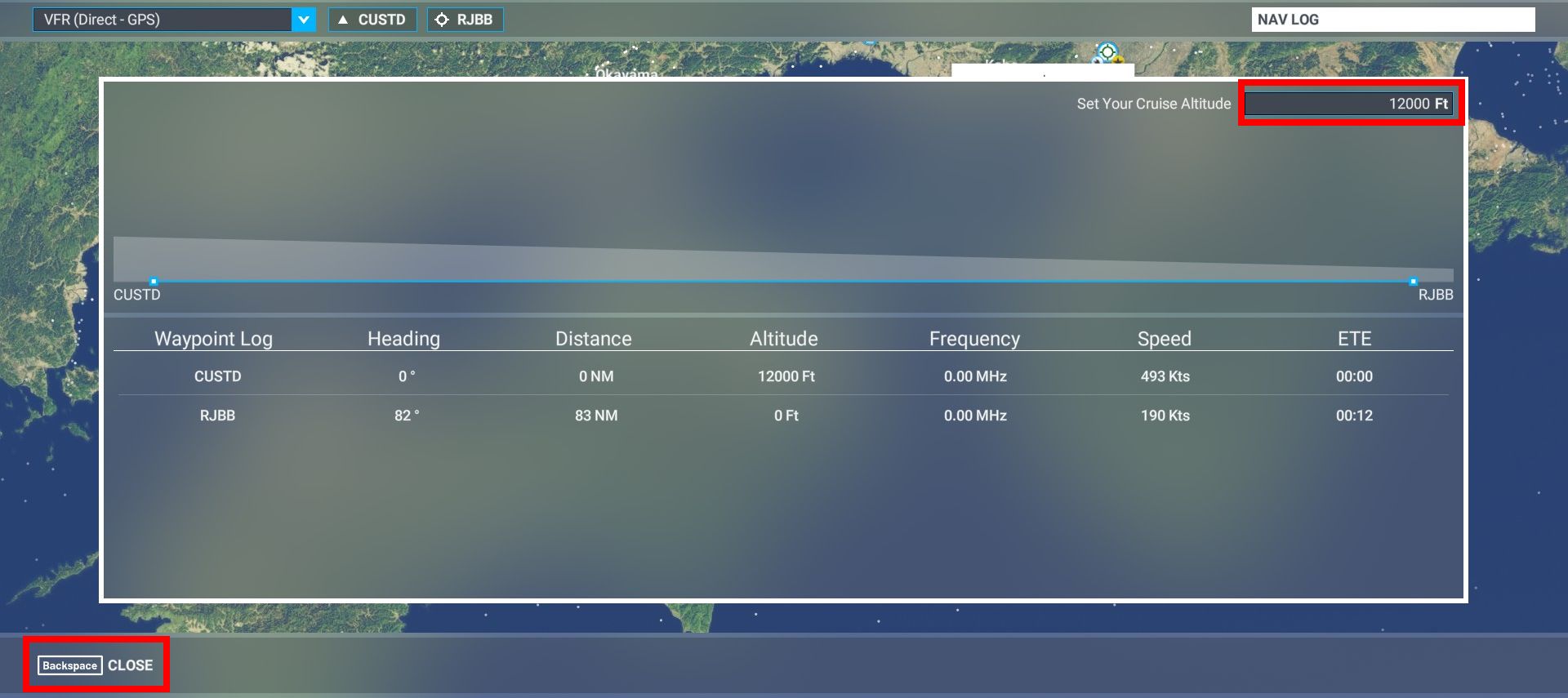
Set Your Cruise Altitudeに「12000」と入力して「Enter」キーを押します。高度が反映されたら「CLOSE」を選択して閉じます。
「FLIGHT CONDITIONS」で時刻と天候の設定をします。慣れるまでは「CLEAR SKIES」(雲、風無し)、時間は明るい時間「日中」にしておきます。
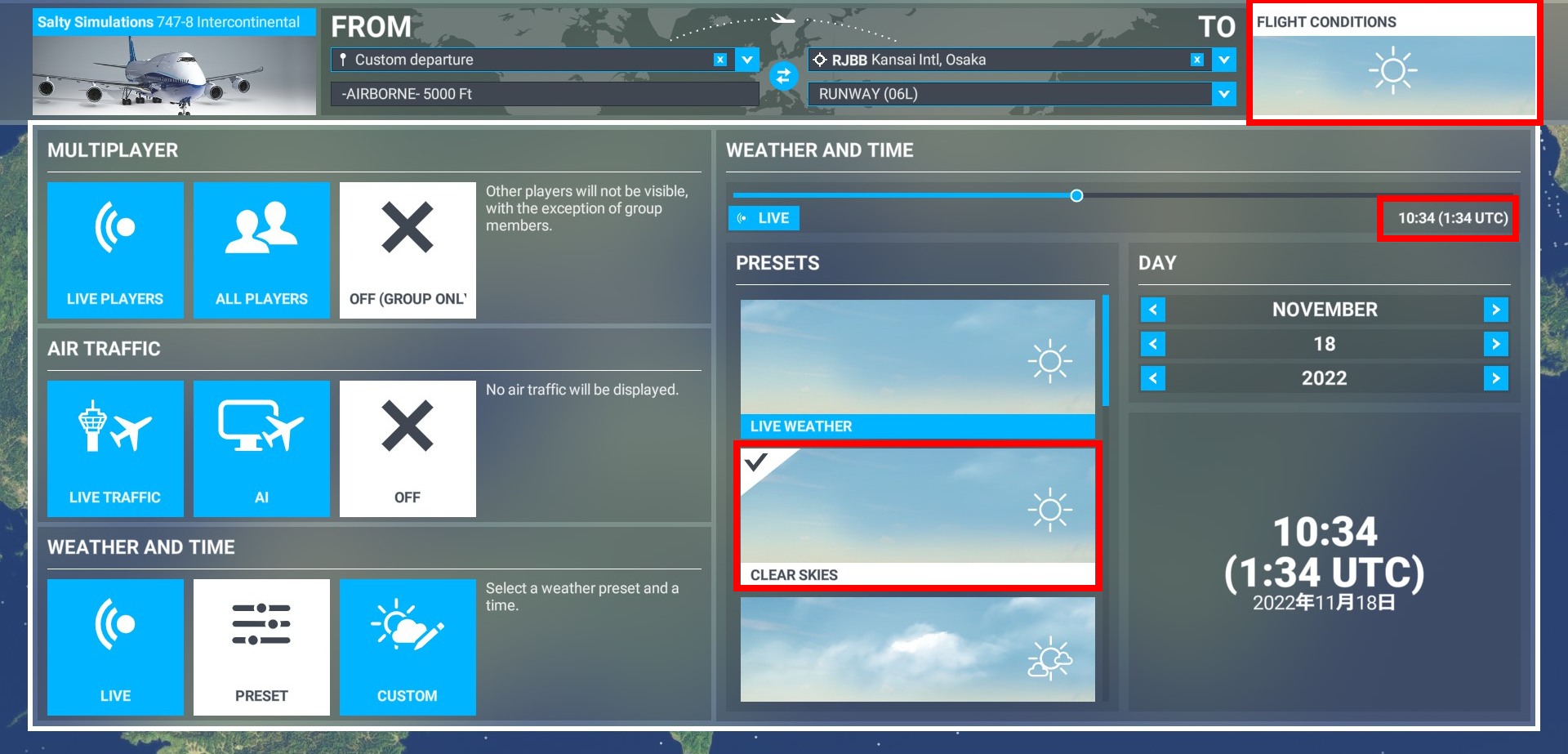
細かい飛行コースは後ほどFMCで入力します。準備ができたら「FLY」でフライトを開始します。
{kind=link}
4.FMCの入力とオートパイロット設定
フライトが開始されたら、目的地までの経路情報をFMCで入力して、オートパイロットを有効にします。
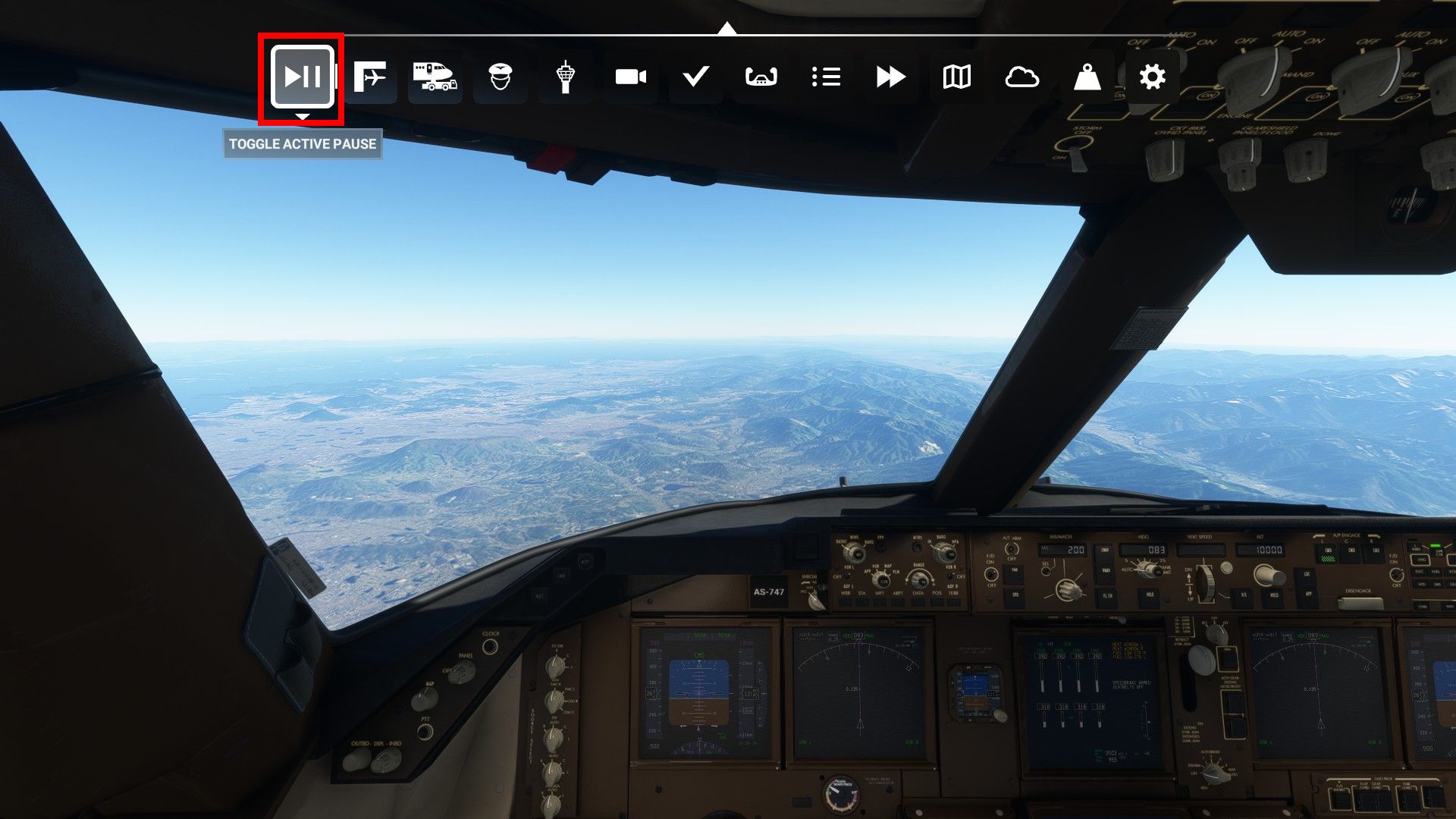
飛行しながらの操作は難しいので、飛行を一時停止します。フライトが開始されたら、すぐに「ActivePause」で機体を止めてください。画面上部のバーから選択するか、キーボードの「Pause」を選択します。
FMCへの情報入力
まずFMCへの情報入力です。FMCはフライトマネジメントコンピュータの略で、オートパイロットや飛行経路、飛行状態など飛行に必要な様々な情報を管理します。FMCへ情報を入力する機器が、電卓の形をしたCDU(コントロール・ディスプレイ・ユニット)です。
CDUとND(ナビゲーション・ディスプレイ)が同時に見える画面をカスタムカメラに登録しておくと入力、確認が楽になります。カスタムカメラの登録は、登録したいカメラ位置でキーボードの「Ctrl(左)+Alt(左)+数字キー」を選択します。登録したカスタムカメラは「Alt(左)+数字キー」で表示されます。※数字キーはテンキーではなくキーボード上部の数字キーです。

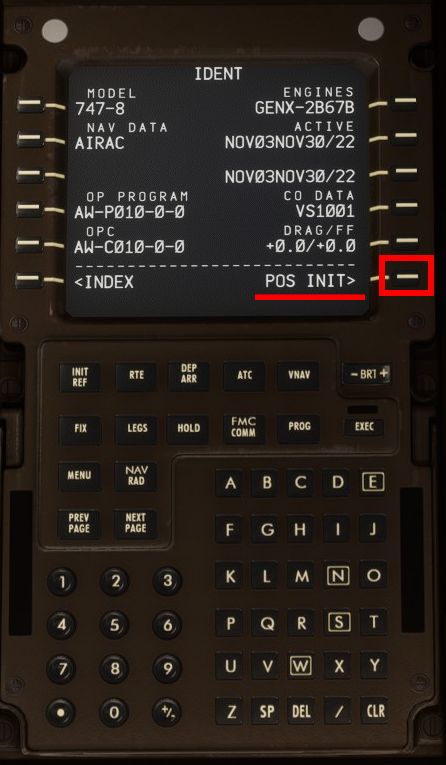
初めに現在のポジションを入力します。CDUの「FMC」を選択します。といってもディスプレイのFMCを選択ではなくて左側のボタンを選択します。CDUの表示を選択する場合は左右のボタンで、文字や数字を入力する場合はCDUのキーパッドで入力します。

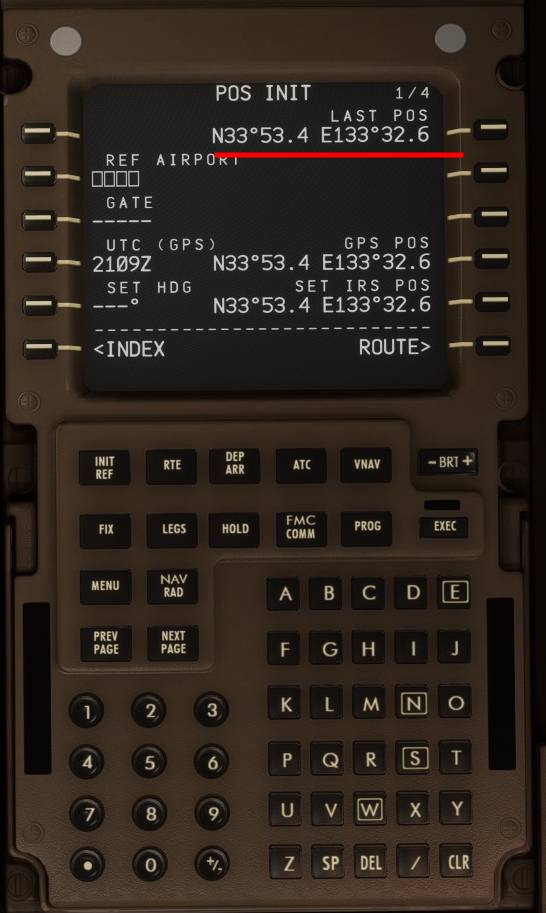
次に「POS INIT」を選択
右側の上から4番目を選択すると一番下に現在のGPSポジションがコピーされるので、右側の上から5番目を選択します。
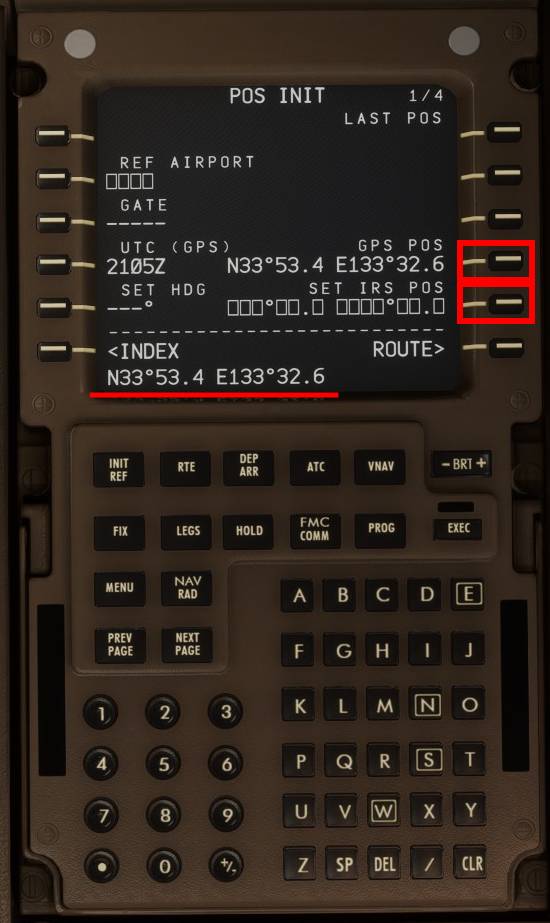
すると「LAST POS」と「SET IRS POS」に現在のポジションが入力されます。
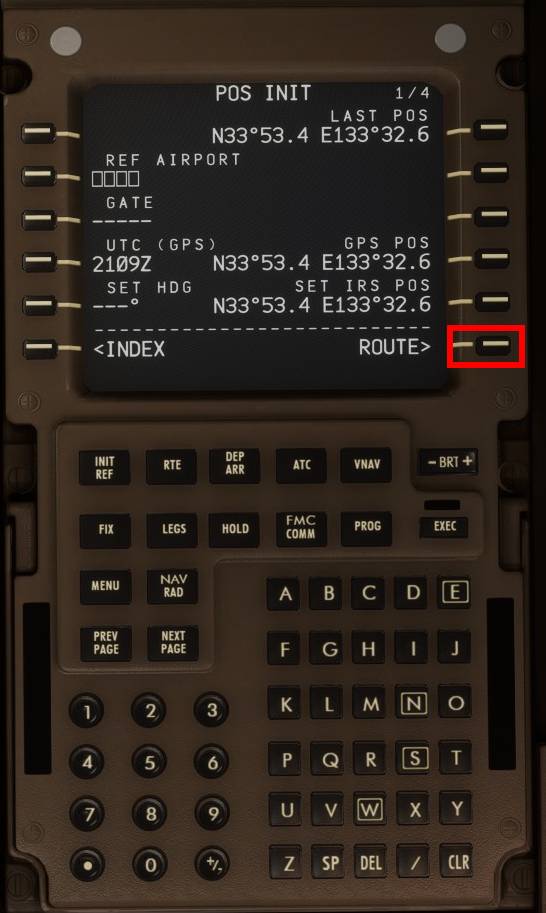
次に「ROUTE」を選択
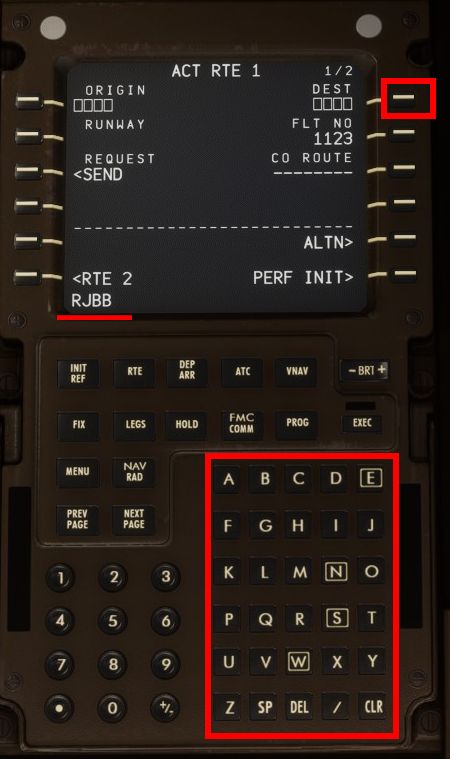
FMCのキーパッドを使って関西国際空港のICAO「RJBB」を入力します。一番下にRJBBと表示されたら、右側の1番目を選択します。
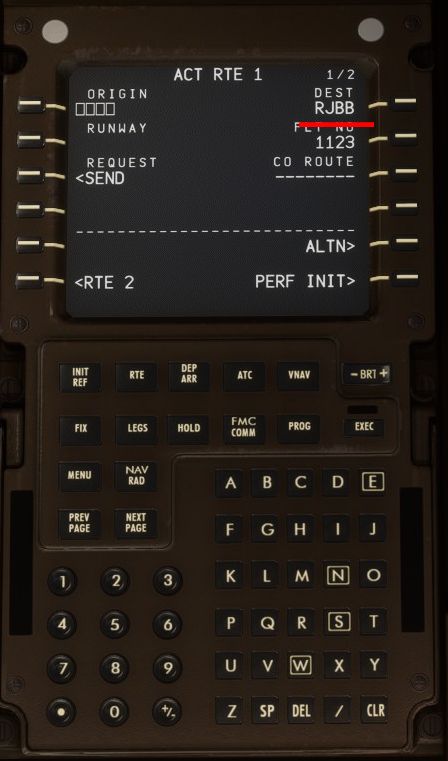
DEST(目的地)が「RJBB」になりました。
※本来であれば離陸前にORIGIN(出発地)とDEST(目的地)を入力します。
※反映に時間がかかる場合は先に進んでも大丈夫です。
次に「PERF INIT」を選択
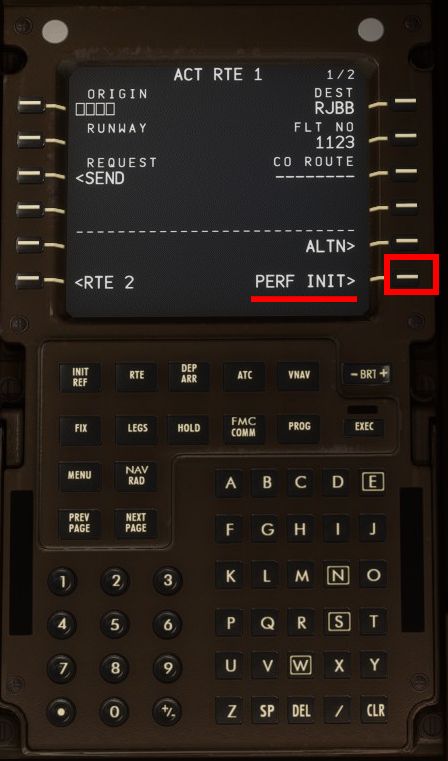
右側の1番目「CRZ ALT」は巡航高度を3桁で入力します。今回は12000フィートなので、FMCのキーパッドを使って120と入力し、一番下に120と表示されたら、右側の1番目を選択します。
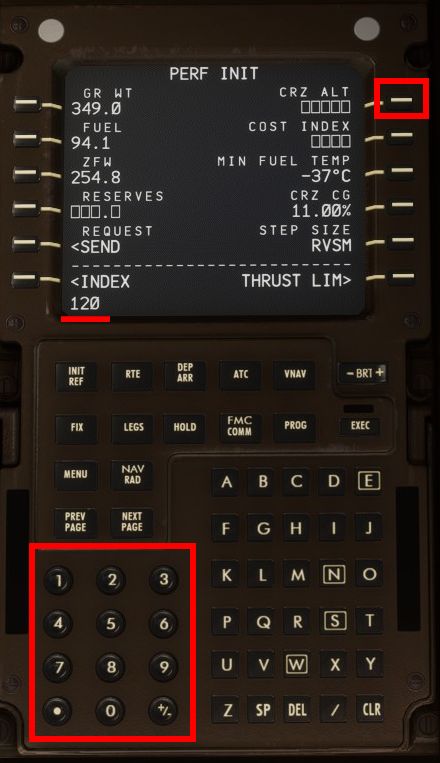
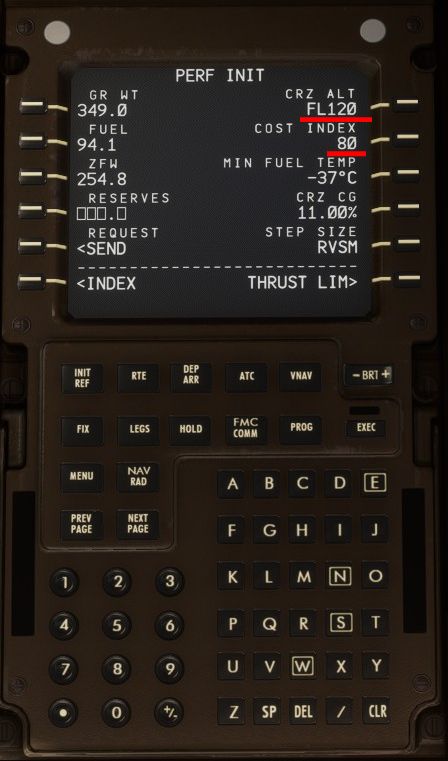
CRZ ALTが120になりました。同様に右側の2番目「COST INDEX」は80を入力します。コストインデックスについての説明は省略しますが興味があれば調べてみてください。
次に飛行ルートを設定します。FMCの「DEP ARR」ボタンを選択します。
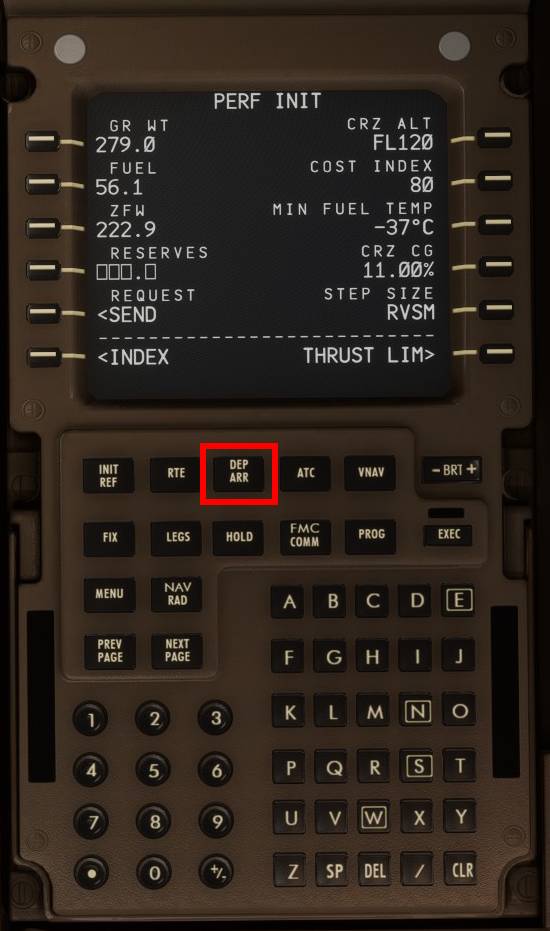
RJBBの右側、2番目「ARR」を選択します。

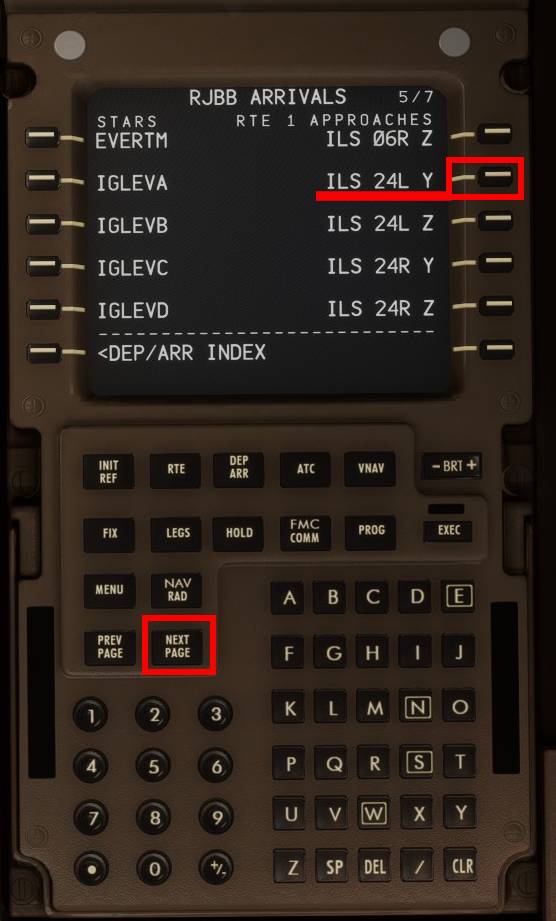
まずは「アプローチ」です。RJBB(関西空港)で使用可能なアプローチが右側に表示されます。「NEXT PAGE」を選択していき「ILS 24L Y」が表示されたら選択します。
次は「到着経路(STARS)」です。選択したアプローチで使用できる到着経路(STAR)が左側に表示されます。「NEXT PAGE」を選択していき「IGLEVC」が表示されたら選択します。
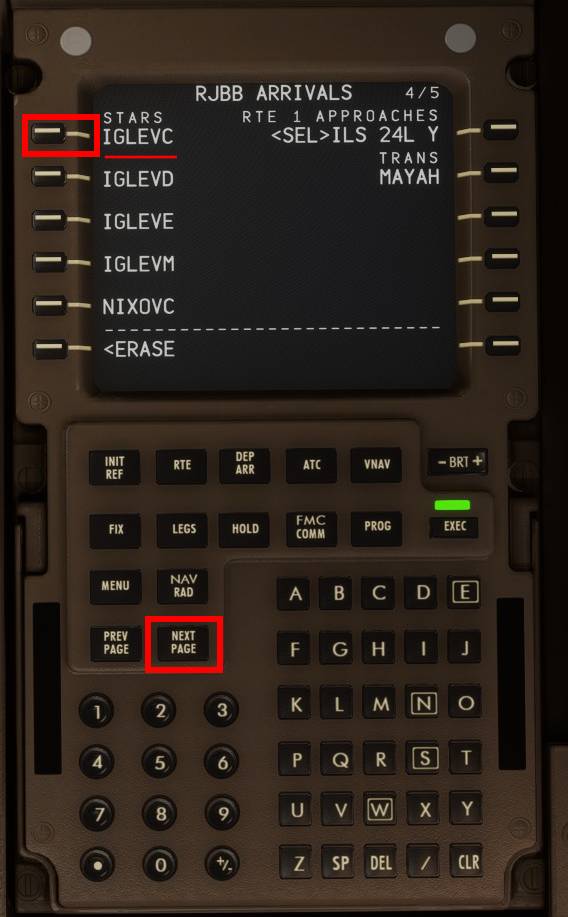
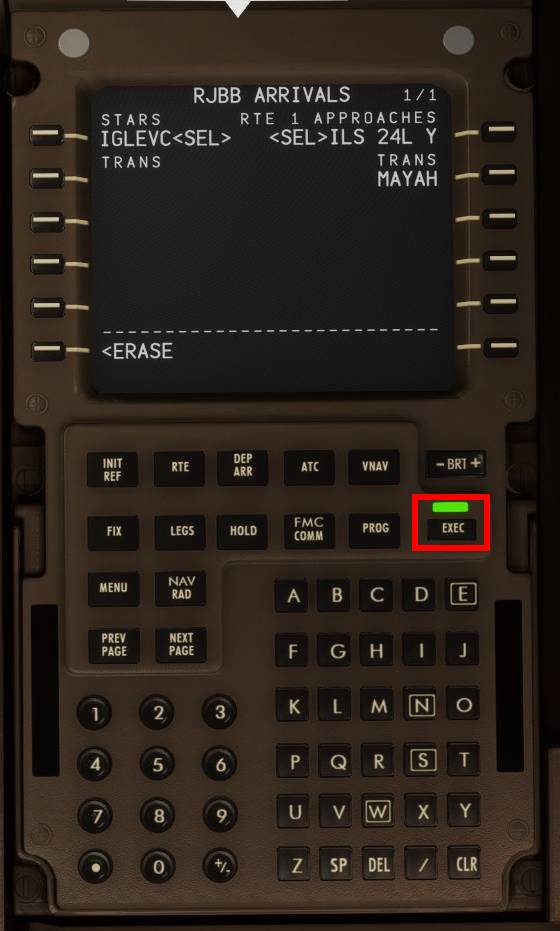
「EXEC」を選択します。
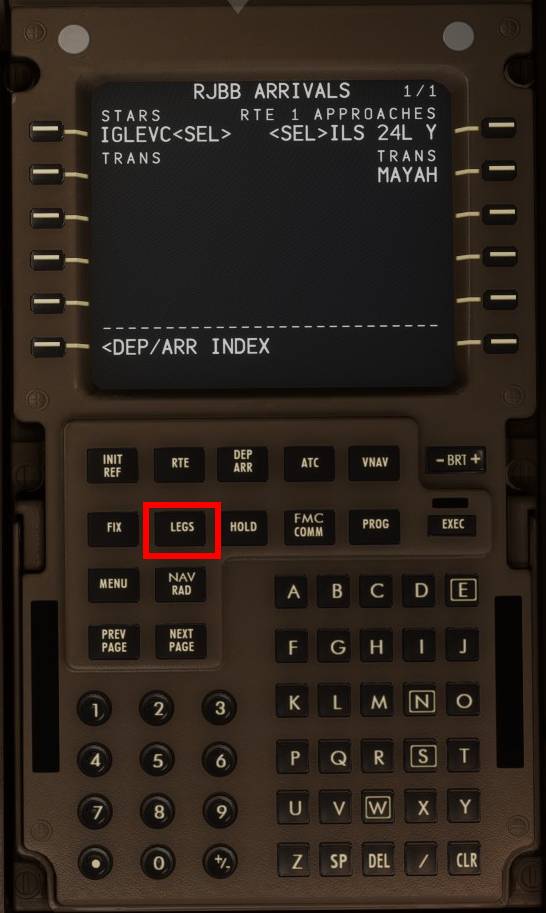
続いて途中経路を設定します。「LEGS」ボタンを選択します。
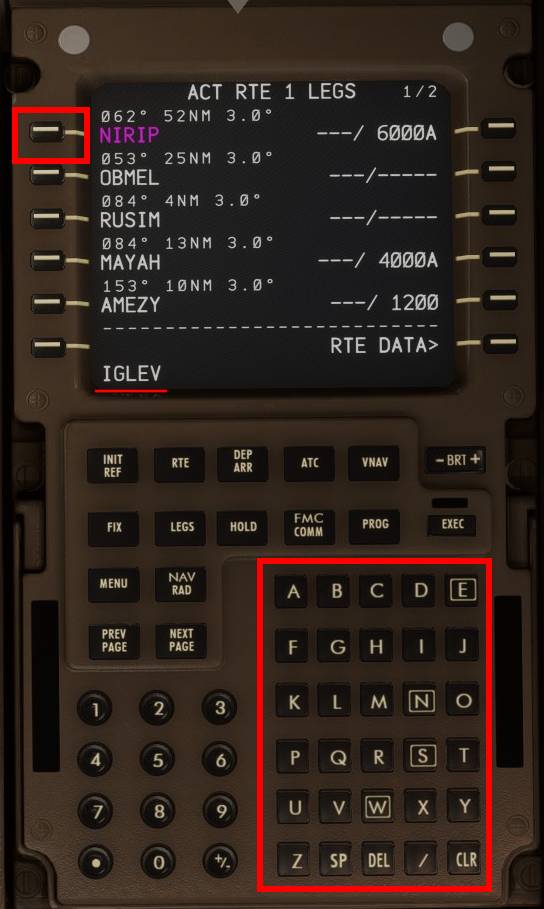
すでに経由ポイントが自動的に設定されていますが、近くのWaypoint(経由地)を追加します。IGLEVと入力して左側の1番目を選択します。入力を間違えた場合は「CLR」ボタンで1文字ずつ消すことができます。
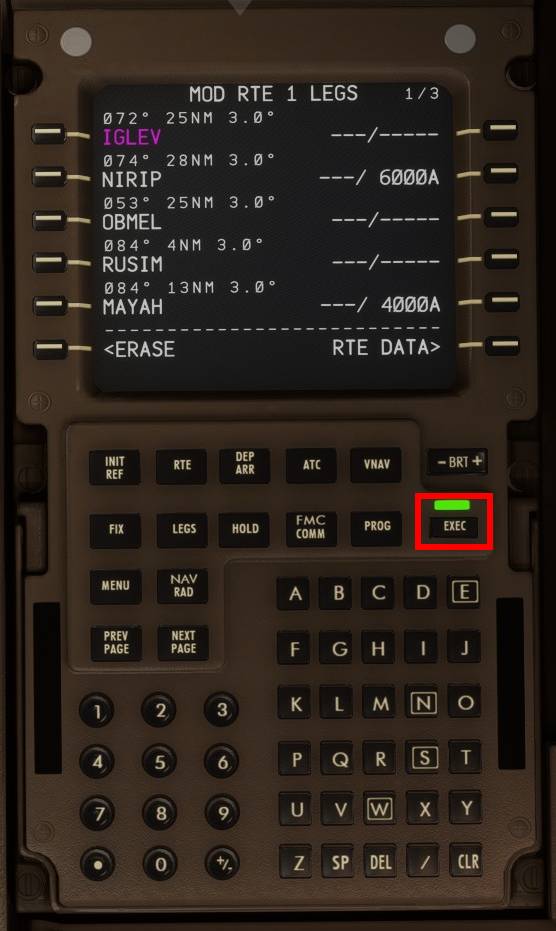
「EXEC」を選択します。
ここで、入力した経路を確認します。NDの少し上にあるこちらのスイッチを「PLN」へ切り替えます。右側のRANGEも右に回して、表示範囲を40くらいへしておきます。

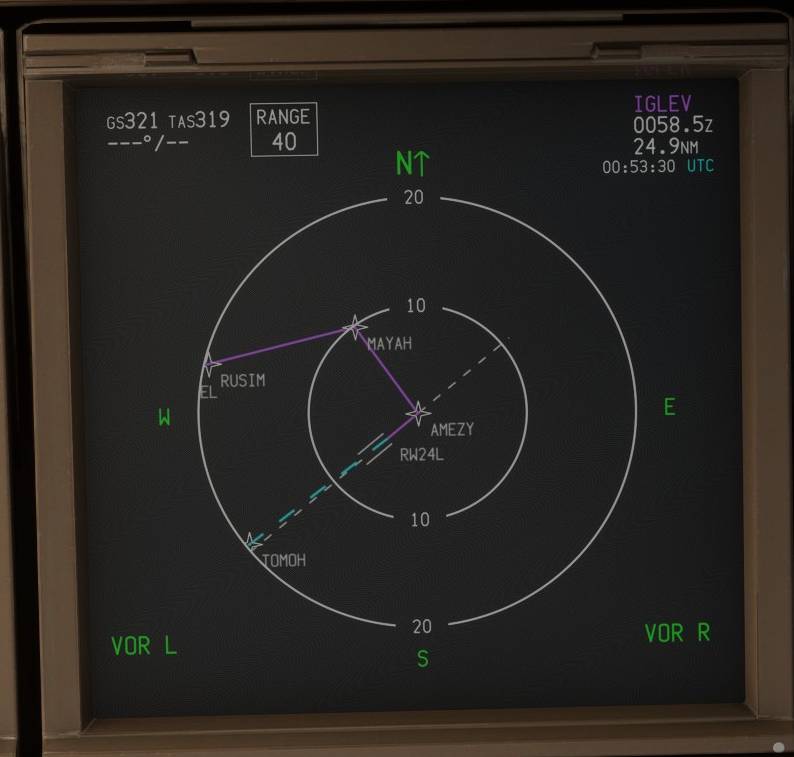
FMCの「LEGS」を選択した状態で「STEP」を選択していくと,NDパネルに選択しているポイントが順番に中心に表示されていきます。

RW24Lが着陸地点、関西空港24L滑走路です。
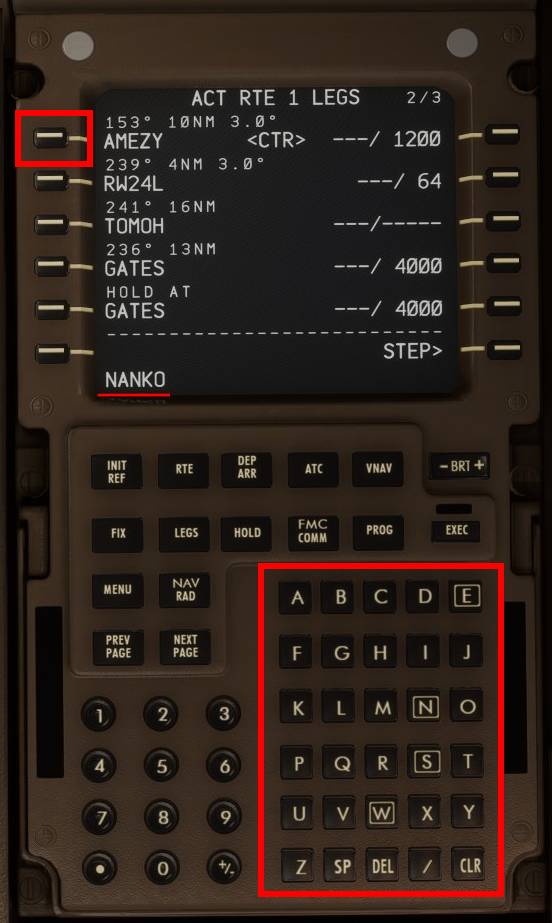
ところで、この進入コースだと最終の旋回が非常に難しくなり、ILSをキャプチャできないこともあるのでポイントを追加しましょう。「PREV PAGE」または「NEXT PAGE」を選択して「AMEZY」が見えたらキーパッドで「NANKO」と入力して「AMEZY」を選択します。
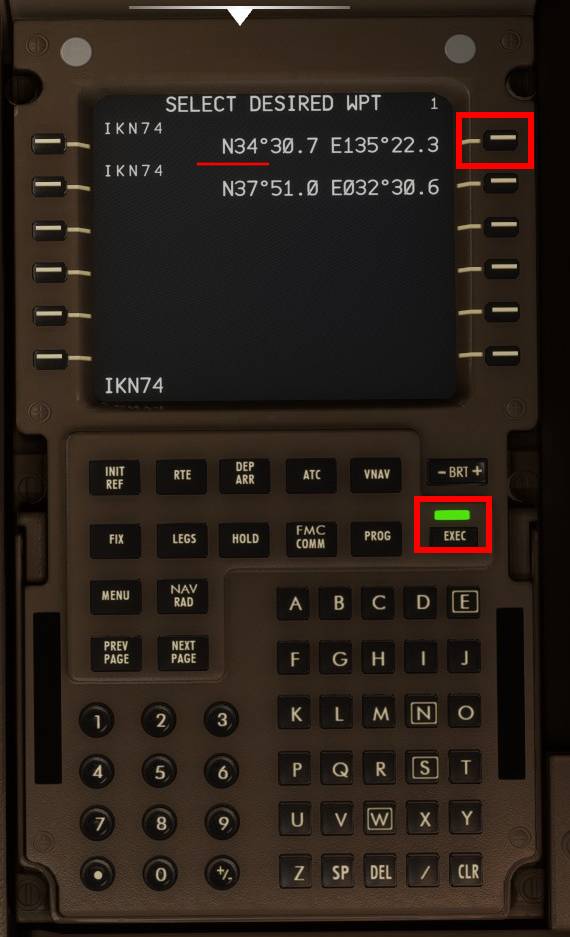
続いて、「IKN74」と入力して「AMEZY」を選択します。すると以下の画面が表示されます。
世界にはAMEZYというWayポイントが2つあるようです。日本の緯度経度に近いN34を選択し「EXEC」を選択します。
「STEP」で確認すると、「MAYAH」から「NANKO」と「IKN74」を経由して滑走路24Lへ向かう経路に変わっていることがわかります。
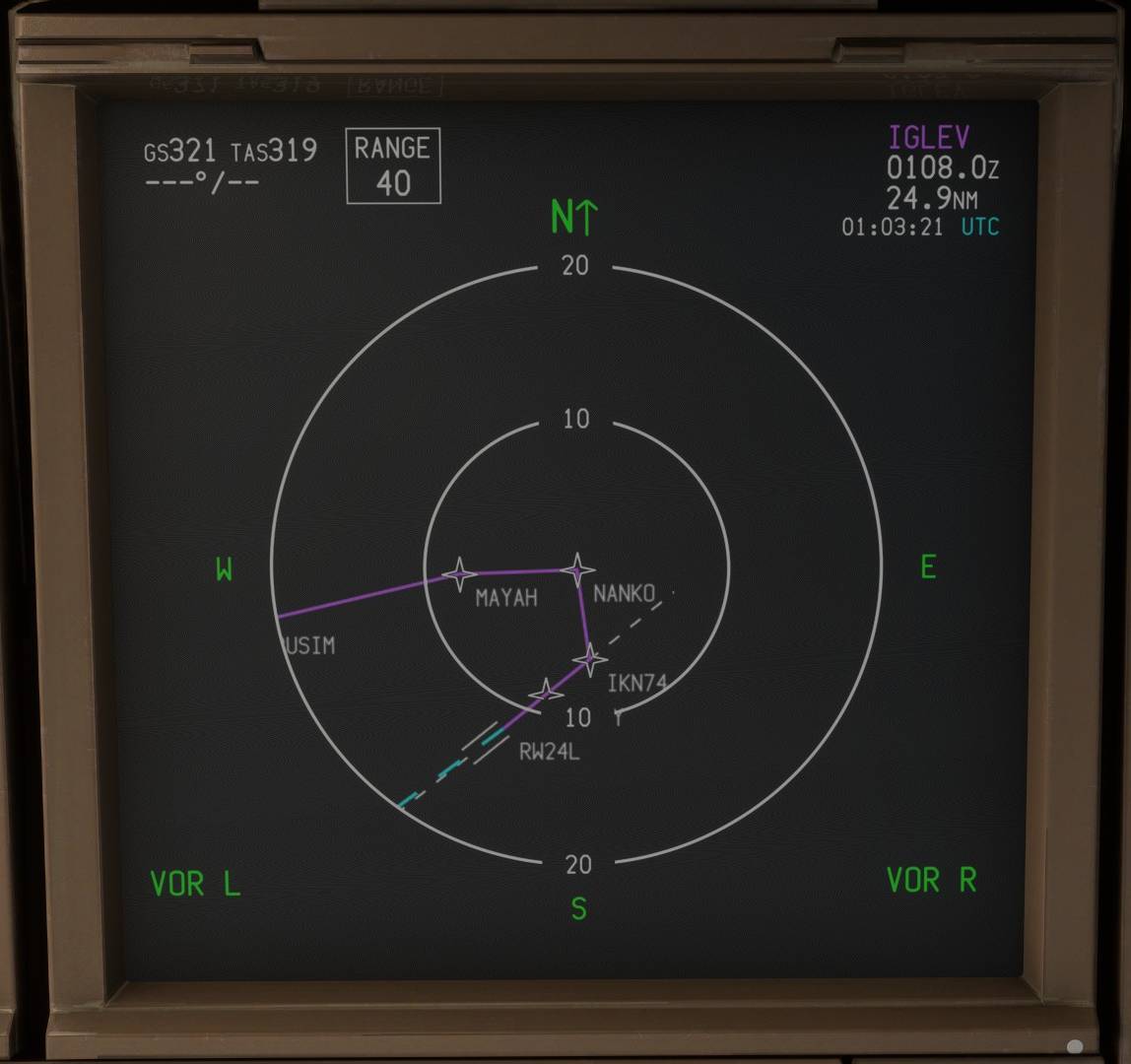
上のスイッチを「PLN」から「MAP」へ戻しておきましょう。

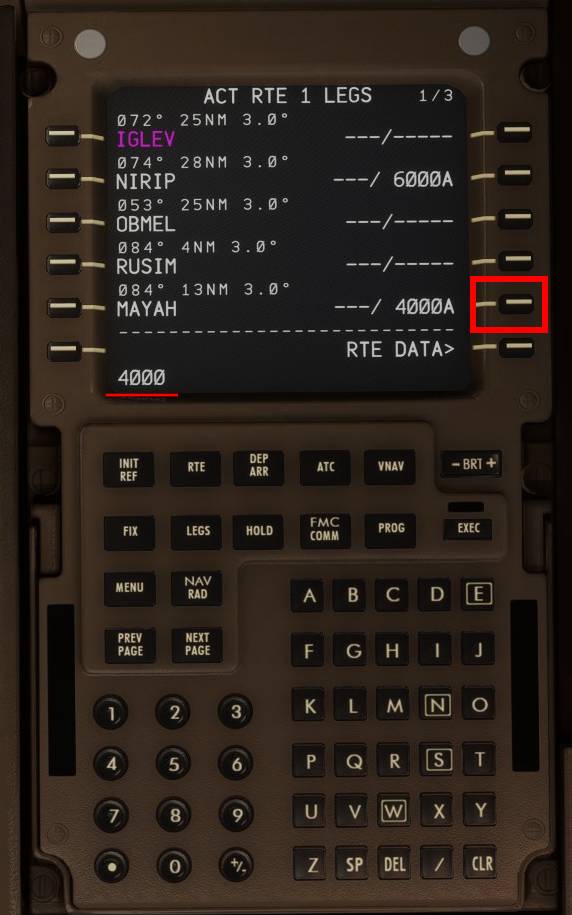
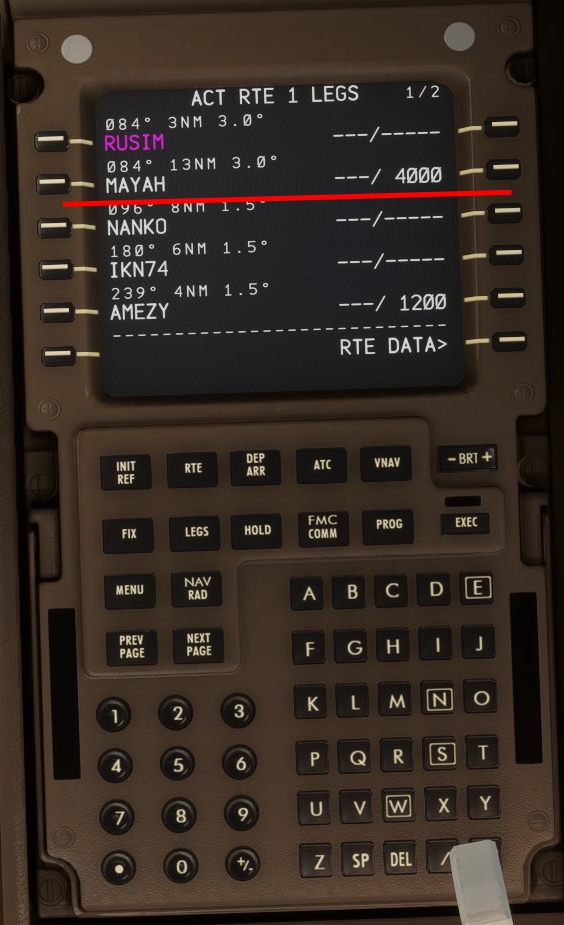
最後に途中経路の高度を修正します。「PREV PAGE」または「NEXT PAGE」を選択して「MAYAH」を確認します。右側に4000Aと表示されていますが、これはMAYAHを4000フィート以上で通過するということです。このままだと高すぎる高度で通過してしまうので「4000」と入力してMAYAHの右側のボタンを選択します。
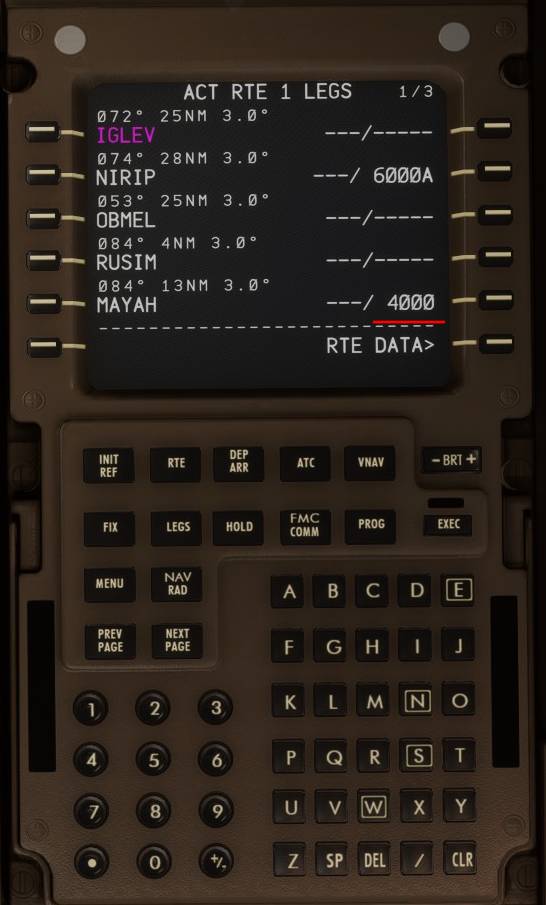
MAYAHの通過速度が4000フィート以上から4000フィートへ変わりました。
これでFMCの入力は終わりです。
オートパイロットの設定
次はオートパイロットの設定です。今回はFMCに入力された高度と速度、コースに従って関西空港へ着陸します。
オートパイロットのパネルで「VNAV」「LNAV」をONにします。「A/T(オートスロットル)」もON(上)にします。オートパイロットのマスタースイッチは初めからONになっていることを確認します。

高度は巡航速度の12,000へ設定します。

ここまでできたら、いよいよ飛行開始です。「ActivePause」を解除して飛行を開始しましょう。
5.オートパイロットに従って飛行開始
飛行を開始すると、「LNAV(進行方向の制御)」「VNAV(垂直方向の制御)」が有効なのでFMCで設定したコースに従って、高度12,000フィートを維持しながらオートパイロットで飛行してくれます。

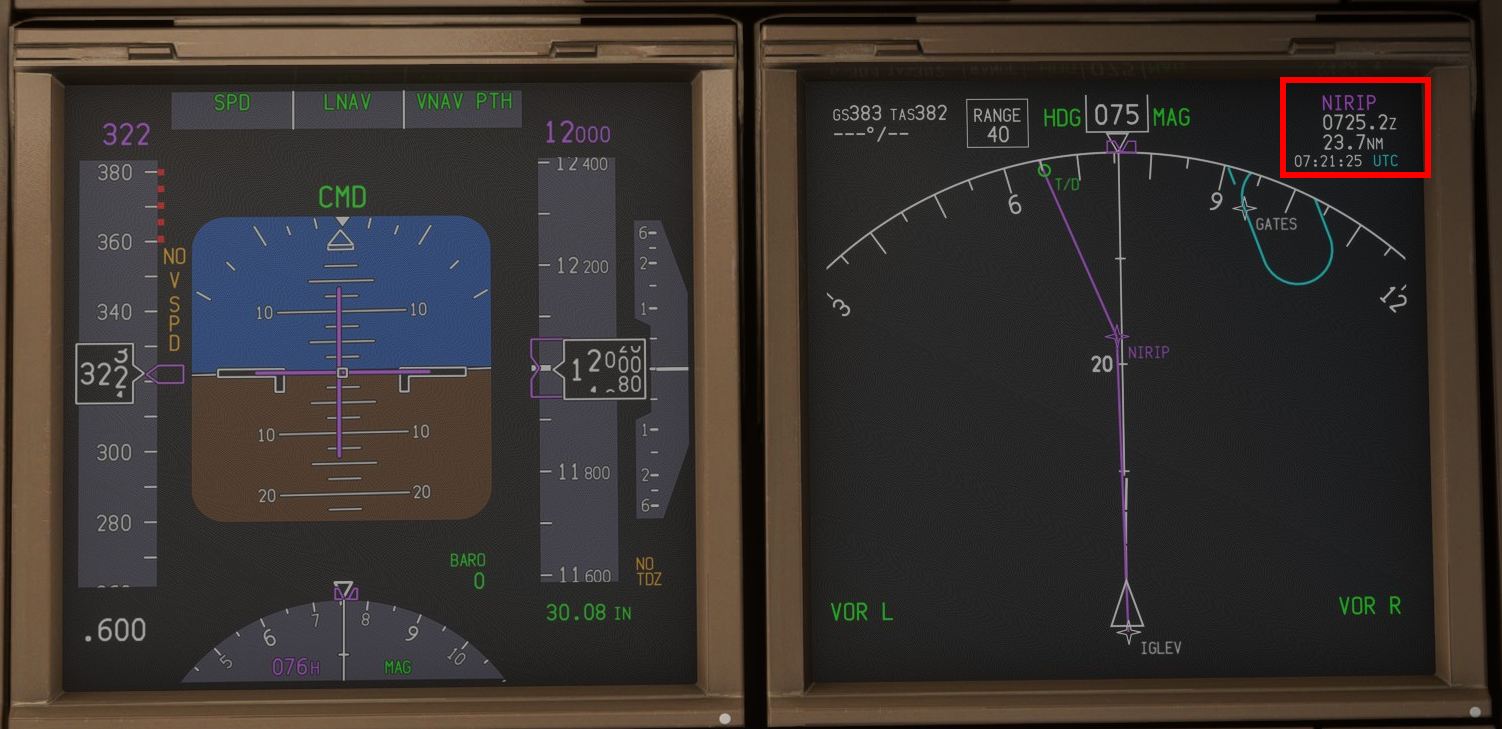
機体はFMCで設定したコースに従って「IGLEV」「NIRIP」ポイントの順に飛行します。NDには次のポイントまでの距離も表示されます。
6.降下準備
機体は四国の徳島県、阿波市上空を飛行しています。一級河川である吉野川に沿って東へ飛行しています。
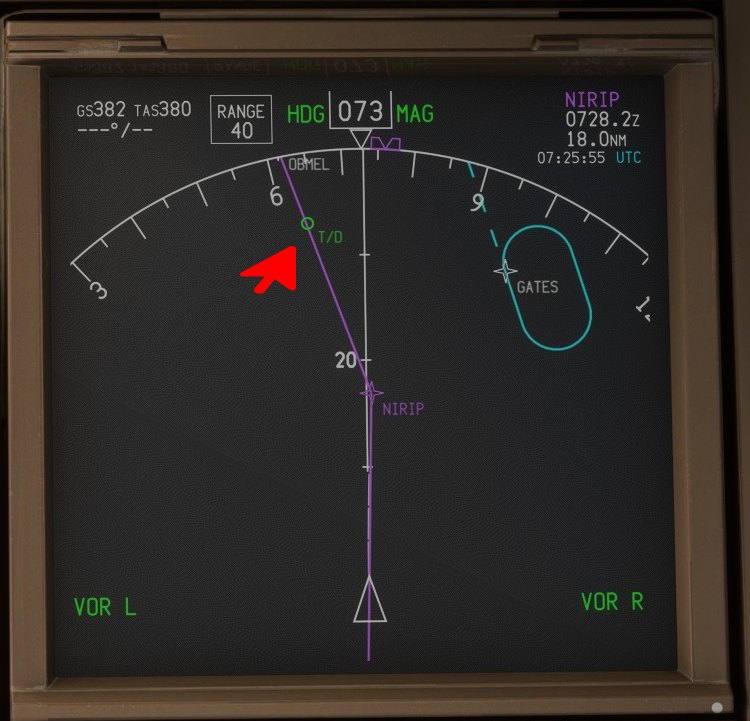
しばらくすると、NDにT/Dという文字が表示されます。Top of Descent(トップ・オブ・ディセント)と読み、FMCが計算してくれた降下を開始する地点です。ここから降下を開始すれば効率的に降下ができます。
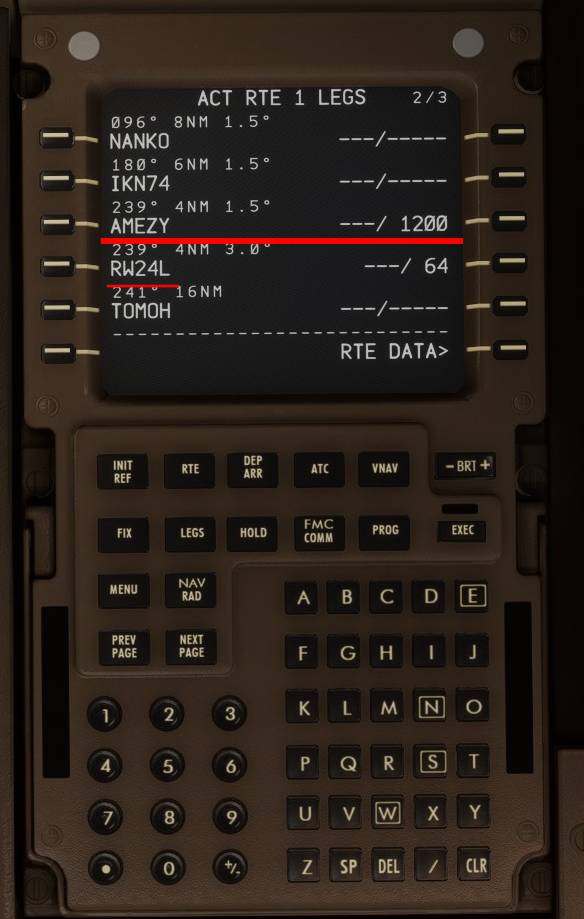
最終的な到達高度を設定します。FMCの「LEGS」を確認します。「NEXTPAGE」ボタンを選択して、着陸する滑走路(RW24L)の一つ前のポイント「AMEZY」の高度を確認すると1200になっています。
「高度選択ノブ」を回して1200へ設定します。

7.降下
機体は淡路島の西側を飛行しています。大阪湾の向こうに着陸する関西空港が見えてきました。

「T/D」を通過すると、自動的に高度と速度が下がり始めます。
高度計規正値の設定
高度計を修正します。航空機の高度計は、気圧の変化をもとに高度を計算しています。地上や飛行中の気圧は天候などで常に変化するため、気圧値(規正値)を設定する必要があります。
本来は到着空港の高度規制値を調べて入力しますが、キーボードの「B」を選択すると、自動で気圧地(高度)が設定(修正)されます。下の画像では気圧値が29.92になりました。

ILS周波数の設定
着陸する関西空港「24L」のILS周波数を入力しておきます。
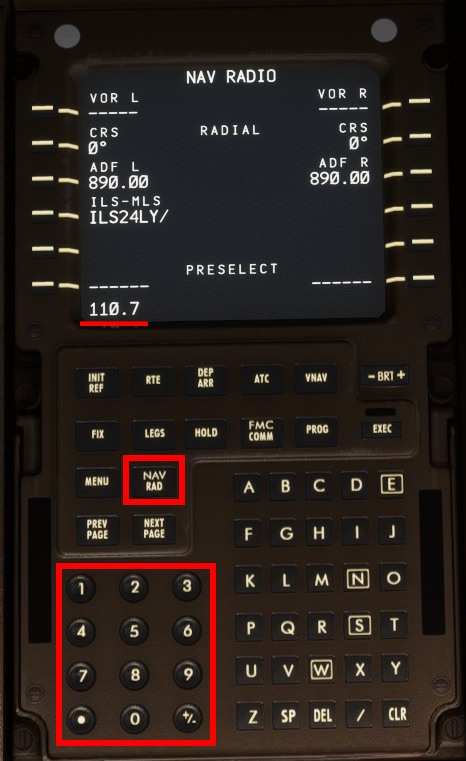
FMCの「NAV RAD」を選択します。関西空港24LのILS周波数「110.7」をキーパッドで入力して、左側の4番目を選択します。※すでに入力されている場合は必要ありません。
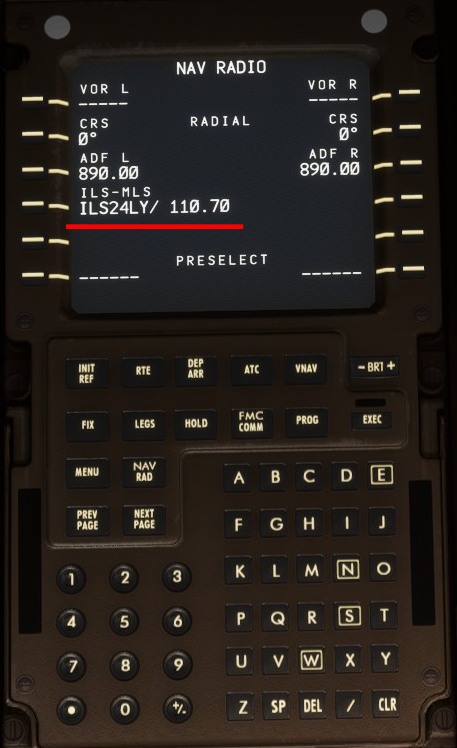
「ILS-MLS」に周波数が入力されました。
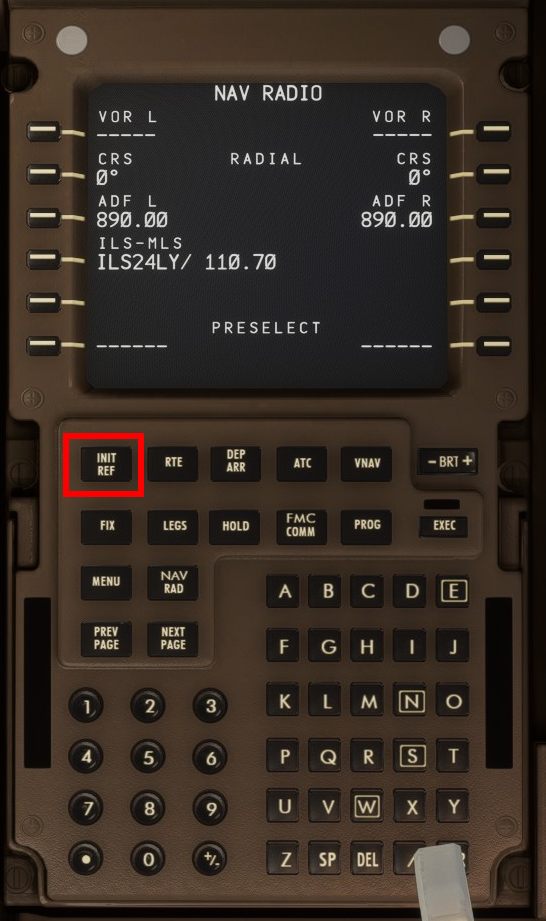
着陸速度の設定
着陸速度を設定します。FMCの「INIT REF」を選択します。
「APPROACH」を選択します。
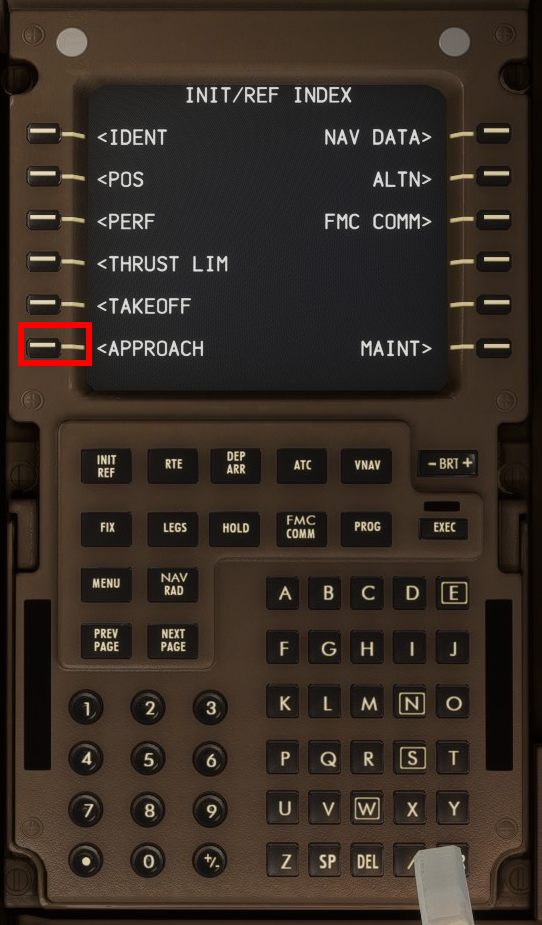
フラップ30°の右側を選択し、右側の4つ目を選択します。
これで今回の着陸時はフラップ30°で速度は154キロノットになります。

オートブレーキの設定
着陸後に自動で減速してくれるオートブレーキを設定します。こちらのノブを「2」に合わせておきます。

スポイラーの設定
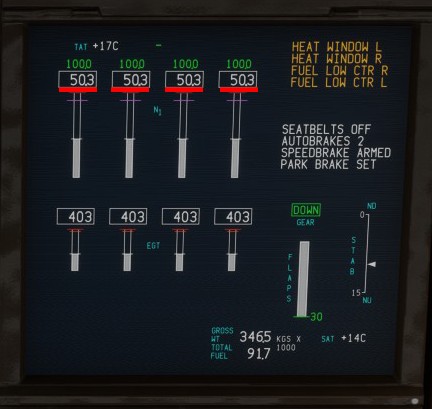
着陸後にスピードブレーキ(スポイラー)が自動で上がるように、ARMED(アームド)の位置にしておきます。少しわかりにくいですが、スピードブレーキのレバーを引っ張った状態が、ARMED(アームド)です。EICASの画面に「SPEEDBRAKE ARMED」と表示されていればOKです。


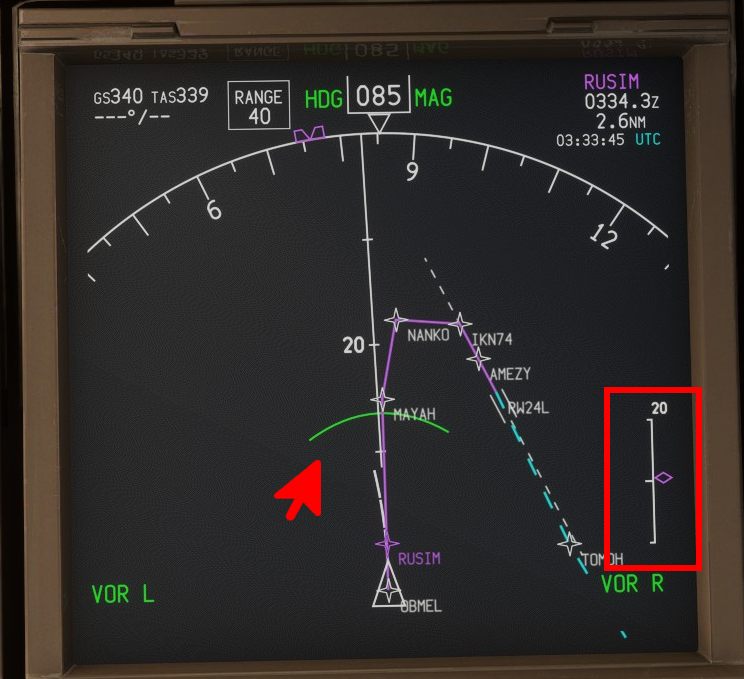
FMCのLEGSを確認すると「MAYAH」の右側に最初に設定した通過高度4000が表示されています。
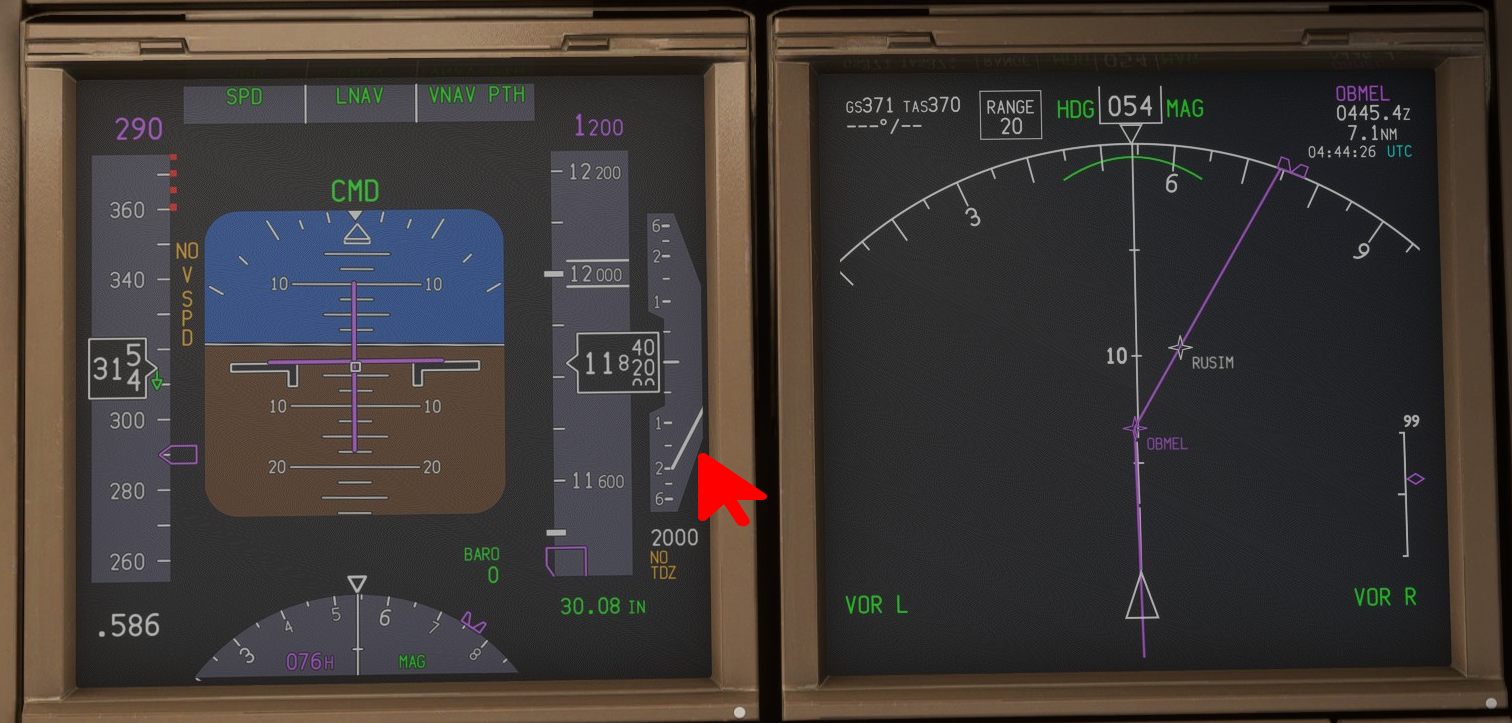
「MAYAH」のあたりに緑色の円弧が表示されます。これは現在の目標高度(4000フィート)に到達できる地点を表しています。
右側の紫色の◇はFMCが計算した高度と実際の高度のずれを表しています。中心より◇が上にあれば予定の降下コースよりも低い、◇が上にあれば低い高度を飛んでいます。現在は中心にあるので問題なさそうです。
8.最終着陸態勢に向けて
本州と淡路島を結ぶ明石海峡大橋の上空を通過します。
神戸空港のすぐ手前、「MAYAH」を4000フィートで通過すると機体は次のポイント「NANKO」に向けて右へ旋回し、再び降下が始まります。


速度はFMCで計算された速度で飛行しますが、指定することもできます。最終着陸態勢に向けて速度を落としましょう。オートパイロットのパネルの「スピードセレクタ」ノブを押します。現在の速度が表示されるので、ノブを回して「175」を指定します。

自動的にスロットが後ろに下がって、速度が240から下がり始めます。
※速度が240まで下がっていなければスポイラーを使用してください。使用後はARMED(アームド)に戻すのを忘れずに・・・
ギア(車輪)を下ろします。ギアダウンのレバーを下げるか、キーボードの「G」を選択します。

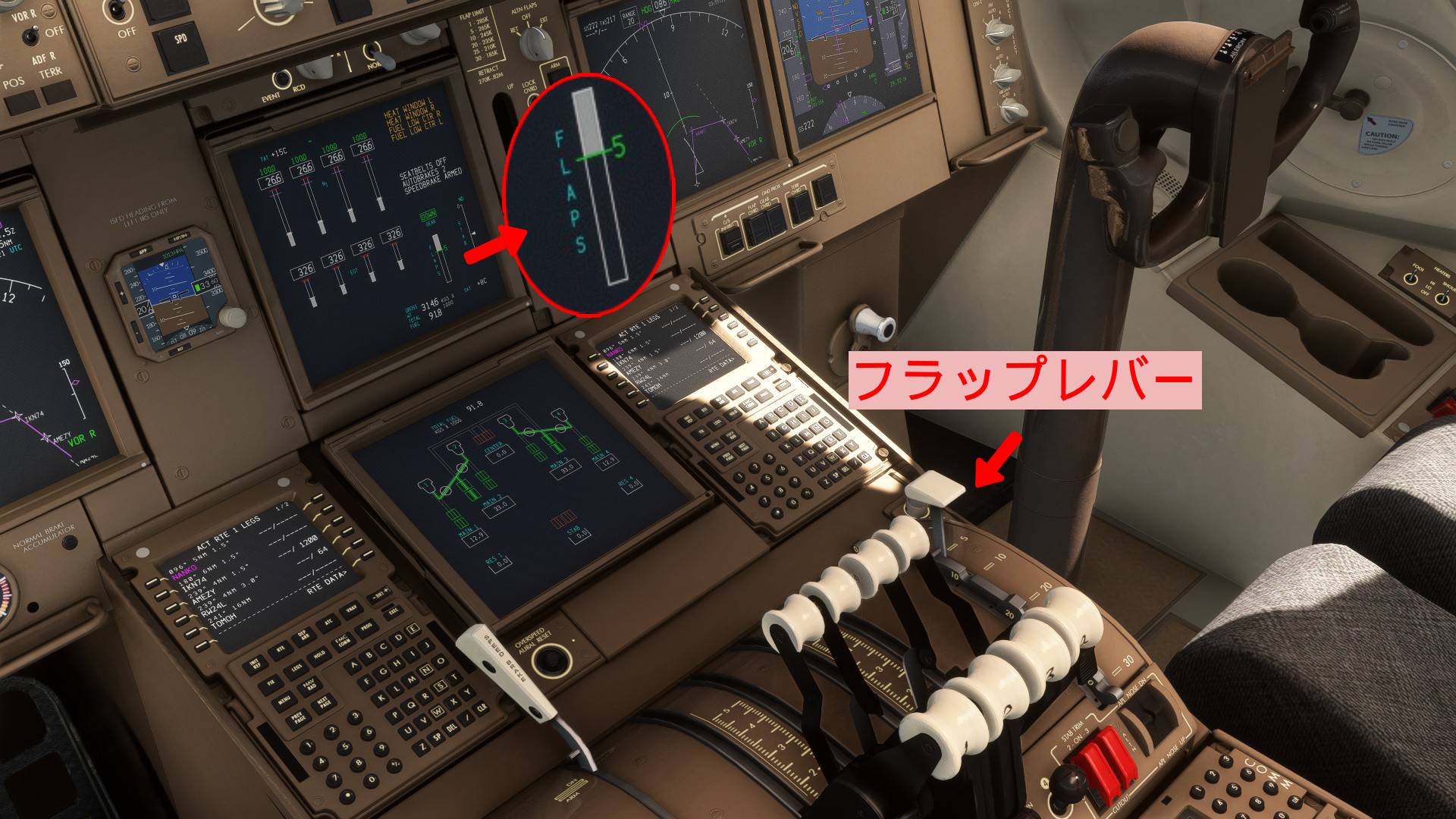
段階的にフラップを展開していきます。フラップのレバーを下げるか、キーボードの「F7」を選択するとフラップが1段階ずつ展開されます。
目安は速度計に表示されている緑の表示です。UPが中心になったらフラップを1へ

1が中心まで来たらフラップを5へという感じで、以降フラップを展開していきます。

フラップ位置はこちらに表示されます。
主翼のフラップが展開されて、ギアもダウンしました。
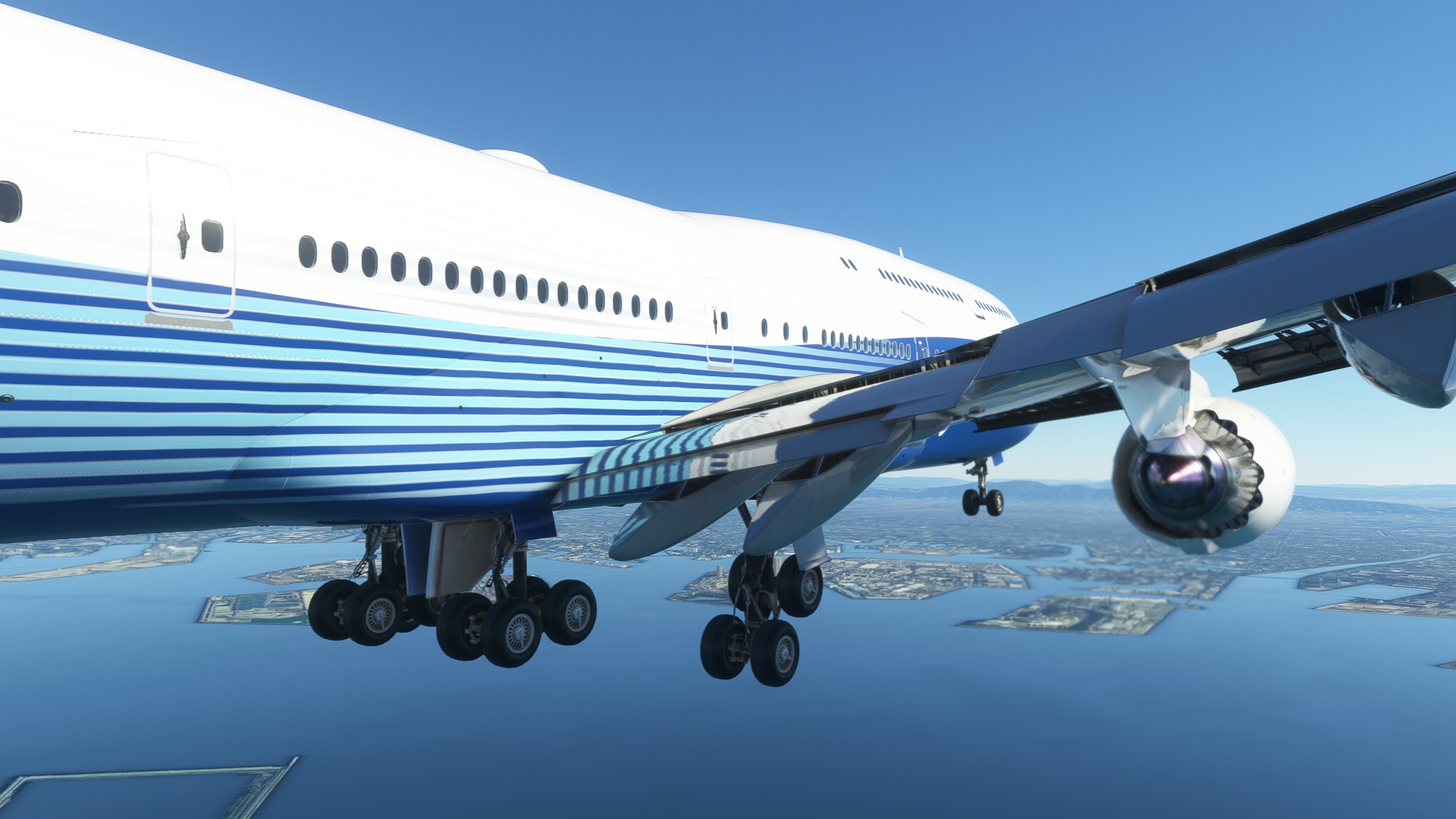
フラップとギアによる空気抵抗が増えたので、速度も175ノットまで落ちたと思います。
ギアを下ろしたので、着陸のためのライトを点灯させましょう。天井のオーバヘッドパネルにある「着陸灯」「タクシーライト」「RunwayTurnoffライト」を全て「ON」にします。

着陸灯とタクシーライトが点灯
9.ILSをキャプチャ
「NANKO]を通過すると次のポイント[IKN74]に向けて右へ旋回します。

コックピット前面に、大阪湾岸の地面と海が迫って来ますが、高度はコントロールされているので大丈夫です。

機体が「IKN74」に向いたらオートパイロットのパネルの「APR(アプローチボタン)」を選択します。

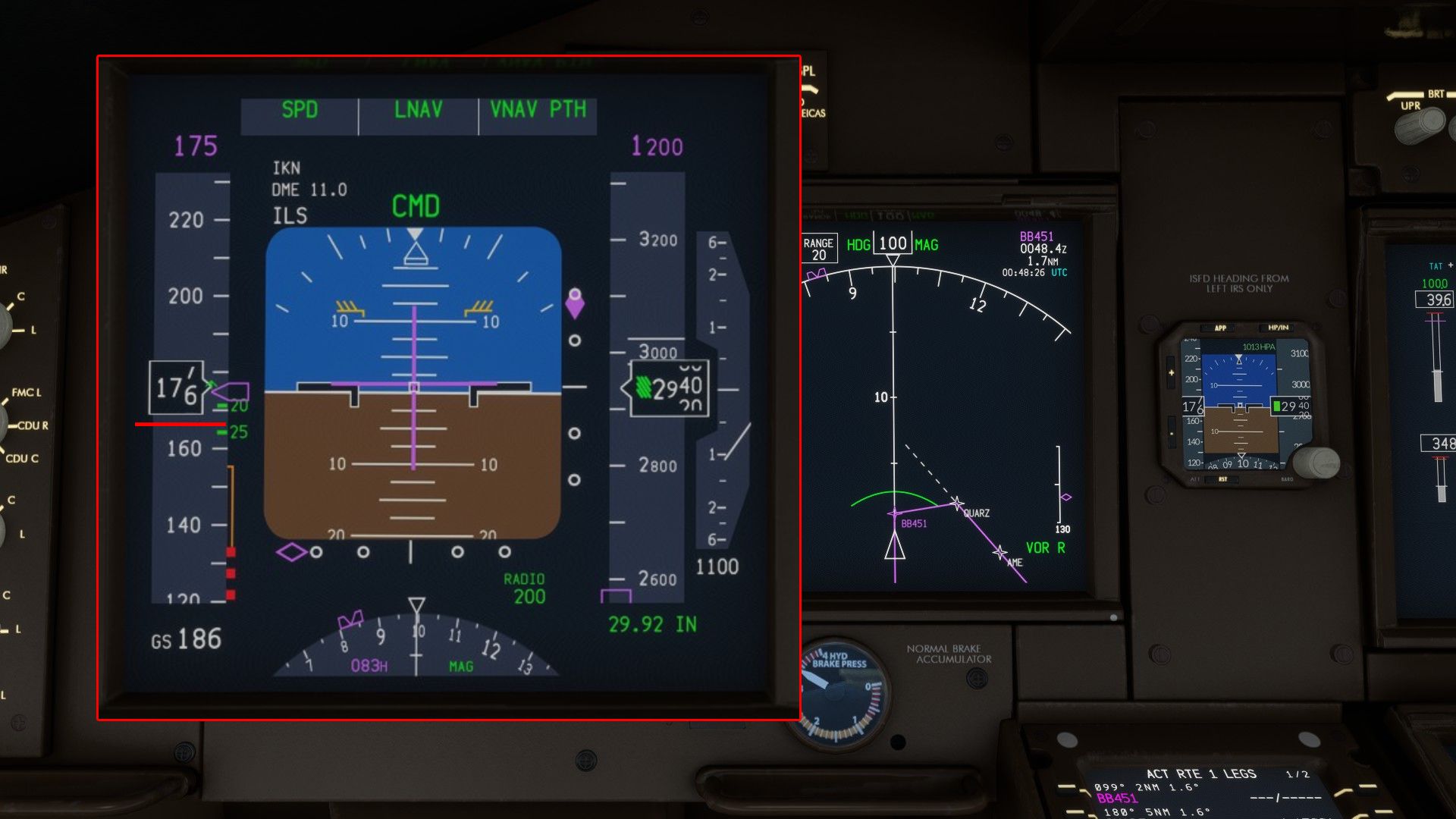
PFDの上部に表示されている「LNAV」の下に「LOC」、「VNAV PTH」の下に「G/S」とそれぞれ表示されます。

「IKN74」を超えて右旋回が始まると「LNAV」の表示が消えて「LOC」だけになります。今まではFMCに入力したコースに従って飛行(LNAV)していましたが、「ローカライザ(ILSの左右方向の信号)」をキャプチャし、滑走路への進入コースへ機体が誘導されます。

関西空港の滑走路24Lへ向けて最後のターンです。
速度を着陸速度まで下げます。PFDの左下に30/154と表示されています。154が着陸速度です。

速度を着陸速度の154に5を足した159へセットします。
速度が下がるのでフラップも最後の30度まで展開していきます。

紫色の◇が上から降りてきて、中央付近になると「VNAV PTH」の表示が消えて「G/S」だけになります。今まではFMCで計算された各ポイントの通過高度、制限高度に従って高度がコントロールされていましたが、「グライドスロープ(ILSの垂直方向の信号)」をキャプチャし、機体はILSに従って滑走路まで自動で降下します。

滑走路までもう少しです。
ILSについては、こちらの記事も参考にしてください。
10.手動操縦に切り替え
滑走路が迫ってきます。高度が600フィートを過ぎたらオートパイロットと、オートスロットルをオフにして手動で着陸させましょう。

オートパイロットをオフ(ディスエンゲージ)、オートスロットルをオフ(下)にします。

オートスロットルをオフにしたタイミングで、EICASのエンジン出力が50%前後であることを確認してください。出力が高すぎると高度が下がらず、低すぎると高度が下がりすぎてしまいます。大きくずれている場合は、スロットルで出力を調整します。
手動に切り替わったら、機首の上下と左右をコントロールしながら滑走路を目指します。
コツとしては、上下(高度)、左右(方向)ともに少しずつ調整することです。滑走路近くまで自動操縦で誘導されていたので、大きくコントロールするとずれてしまいます。

目指す設置点は滑走路にある白くて太い線です。ここを目指して降下していきます。

接地点の隣に「PAPI」という灯火があります。適正な進入角度(高度)を教えてくれます。
白2,赤2が見えているのがちょうどいい進入角度、白の数が多く見えると高すぎる、赤の数が多く見えると低すぎる状態です。ただMSFSではPAPIが暗くて見えにくいのであまり使えません。

11.着陸
いよいよ着陸です。高度が下がると、高度の読み上げが始まります。
高度30フィートになったら、「F1」キーでエンジン出力をゼロ(アイドル)にします。同時に接地の衝撃を抑えるために機首を少し上げて、降下率を下げて滑走路へ接地させます。この接地直前の機首上げをフレアといいますが、タイミングが難しいです。
滑走路に接地すると、自動でスポイラーが展開されます。「F2」キー(エンジン出力減少)を押し続けると、逆噴射がかかります。
速度が50ノットくらいになったら、「F1」キーでエンジン出力をゼロ(アイドル)にして ブレーキで速度を緩めます。誘導路に出たら、再びスロットルを少し上げて駐機場へ向かいましょう。

12.手動での着陸にチャレンジ
今回は、高度500フィートまでオートパイロット、オートスロットルにお任せして着陸しましたが、もっと遠くから手動での着陸にチャレンジすることもできます。機体が大きく速度も速いのでコントロールが難しく、なかなかうまくいきませんが着陸ゲーム感覚で楽しみましょう。

ILSのローカライザ(左右方向の信号)に従って、機体が滑走路方向へ向いたタイミングから手動で着陸させてみましょう。機体が「IKN74」を通過して「AMEZY」へ向いたタイミング、高度は1800フィート前後です。

オートパイロットをオフ(ディスエンゲージ)、オートスロットルをオフ(下)にします。

ILSのグライドスロープ(上下方向)が下りてくるまでは、スロットルを調整してエンジン出力を55%(※)くらいにして高度を保ちます。※重量や風向きにより変わります

ILSのグライドスロープ(紫色の矢印)が上から降りてきてら、スロットルを調整してエンジン出力を51%くらいにして降下していきます。

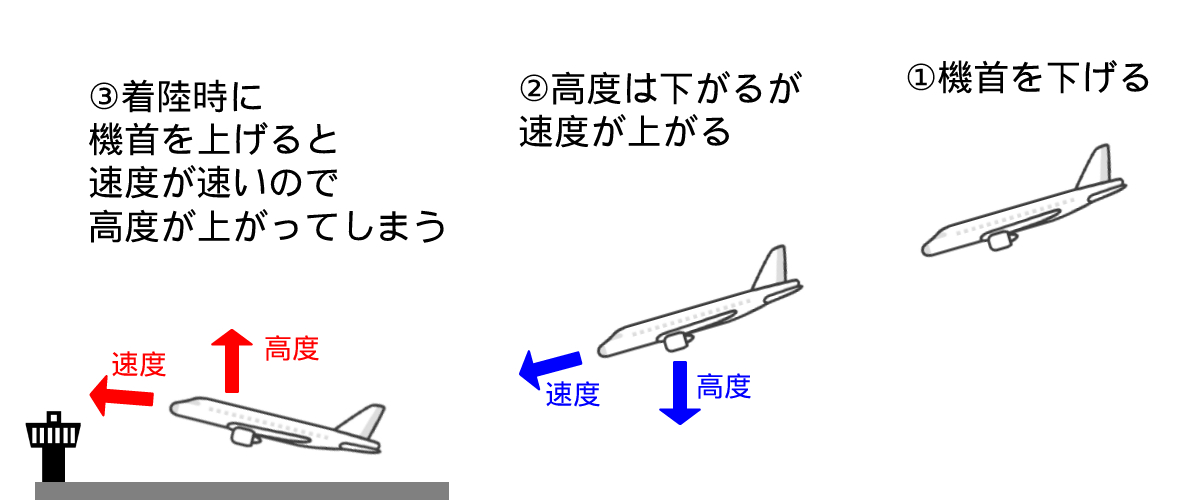
注意点として降下率は機首の上げ下げではなく、エンジン出力でコントロールします。機首を下げると降下率が増えて高度は下がりますが、速度が上がってしまい接地の時に機首を上げると機体は上昇してしまいます。
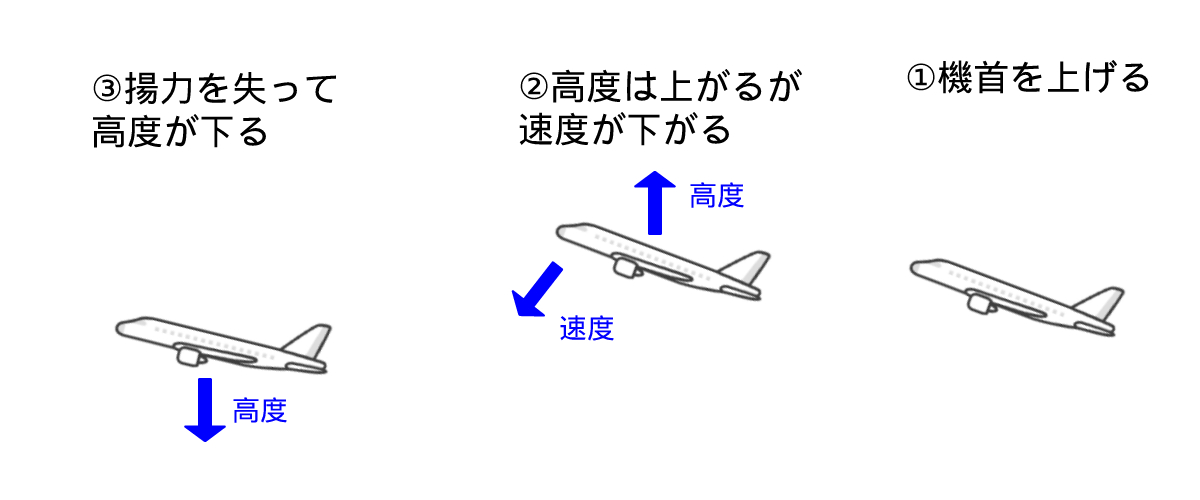
機首を上げると一時的に降下率は減少して高度は上がりますが、空気抵抗が増えるので速度が下がり、結果として高度が下ってしまいます。
少し機首を上げた状態で、滑空するように降下していきます。降下率はエンジン出力でコントロールし高度の微調整を機首の上げ下げで行います。
左右方向は、ILSのローカライザ(紫色の矢印)を確認しながら、滑走路の延長線上を飛行するイメージで調整します。

滑走路が近づいてきたら、上で書いているように滑走路の設置点を目指して着陸しましょう。
速度調整(降下率)が難しい場合は、オートスロットルだけは500フィート付近まで有効にしてみるのも有りです。
13.最後に
うまく着陸できましたか。慣れるまでは滑走路から大きく外れてしまったり、行き過ぎてしまったりすると思いますが、練習するとコツがつかめると思います。
夜間着陸にチャレンジしたり

こちらの記事で紹介しているリプレイツールを使って、自分の着陸を眺めたり

客席視点で眺めたりして、ジャンボ機の着陸を楽しみましょう。

Comments
詳しく教えていただきありがとうございます。とても参考になってます。