前回に続いて、MSFSのATR 72-600の操作方法を解説します。今回は離陸から、オートパイロット(VNAV)を使用した上昇、巡行、降下とILSを使用した着陸、そしてエンジン停止までを解説します。初心者向きに最低限の設定、操作のみの手順となりますので、実際の航路や高度、手順とは異なります。また専門用語などは分かりやすい言葉に置き換えています。
目次
- 1.滑走路からスタート
- 2.離陸前チェック
- 3.離陸
- 4.オートパイロットで上昇
- 5.巡航
- 6.降下開始(VNAVによる降下)
- 7.オートパイロットによる降下と減速
- 8.着陸の準備とILSをキャプチャ
- 9.オートパイロットの解除と着陸
- 10.エンジン停止とシャットダウン
1.滑走路からスタート
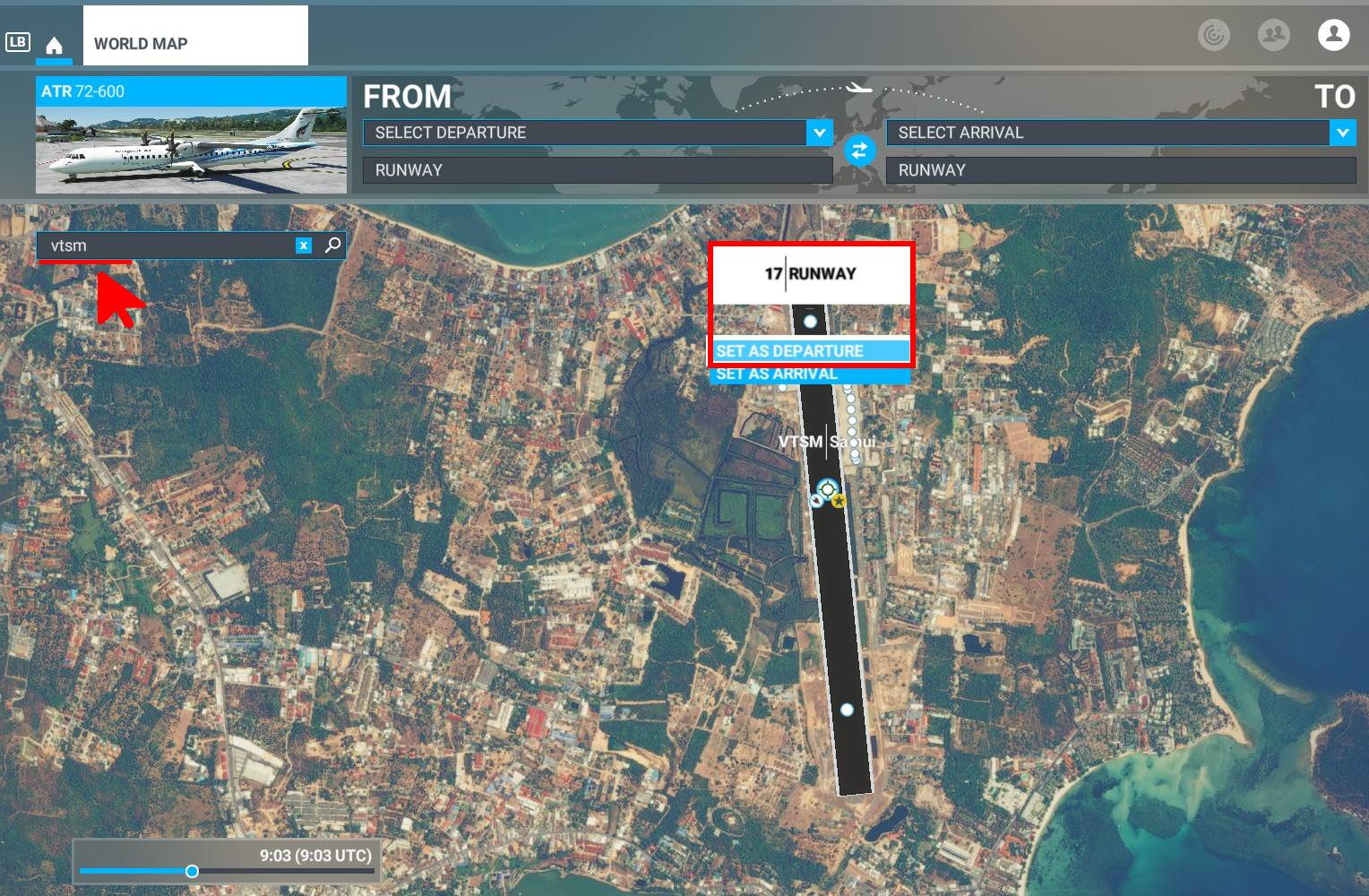
前回の記事で、エンジン始動、FMCの入力、出発準備が整った状態でサムイ島の滑走路17へやってきました。
エンジン始動や、滑走路へのタキシングを省略したい場合は、フライトの選択画面でサムイ島空港(VTSM)の「滑走路17からの出発」を選択すると、エンジンが始動した状態で滑走路17からスタートできます。
その場合はフライト開始後に、前回の記事の
6.FMCの入力
8.出発準備
①オートパイロットの設定
②トリムの設定 ※トリムの調整のみ。「CONFIRM T/O DATA」は不要
を実施すると同じ状態になります。
2.離陸前チェック
滑走路末端へ到着したら離陸前のチェックです。
スロットルにある「ガストロック(スロットルの動きを制限するレバー)」をリリースします。

中央にある「Weather Radar(気象レーダ)」ノブを「WX」へセットします。

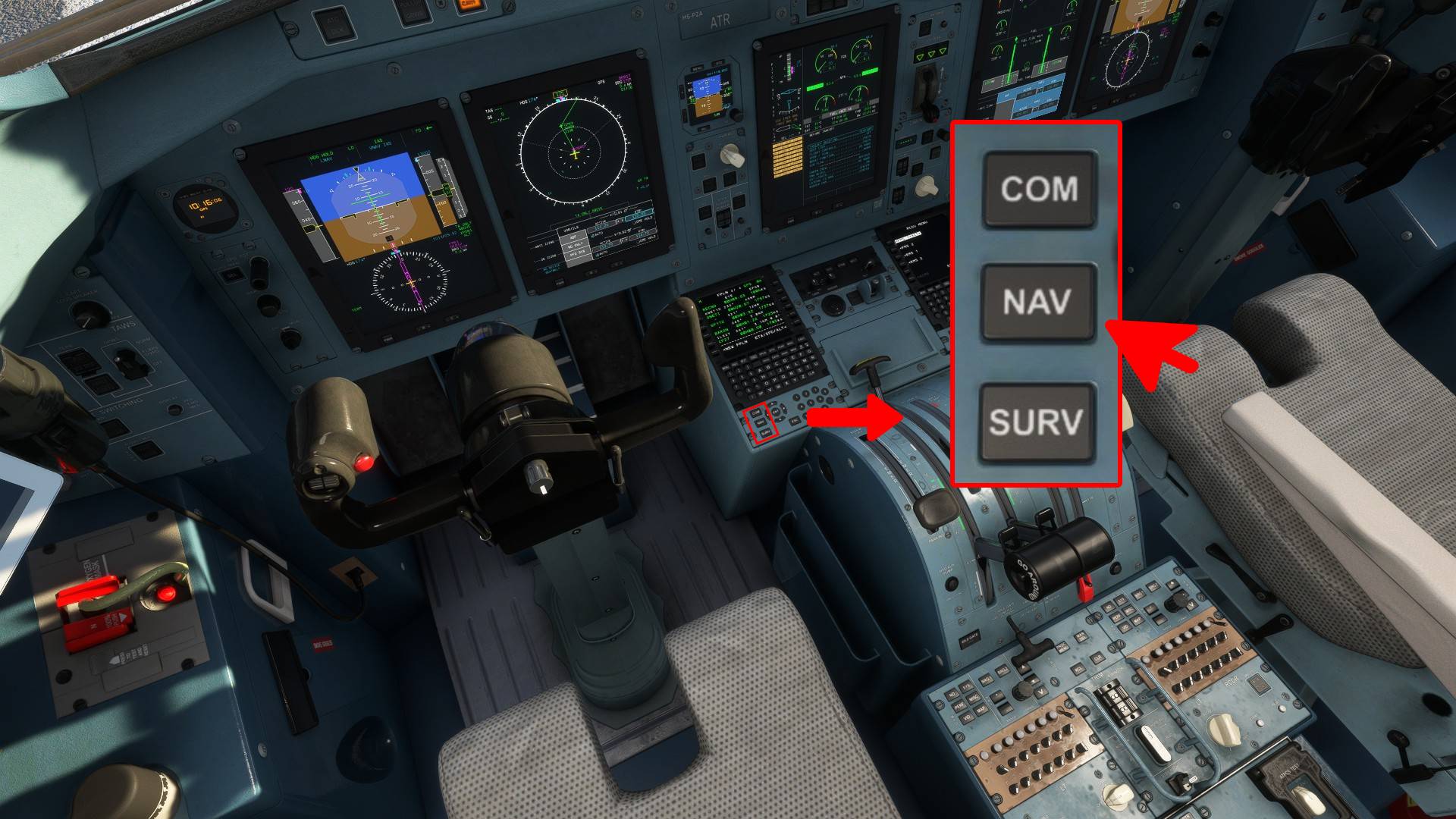
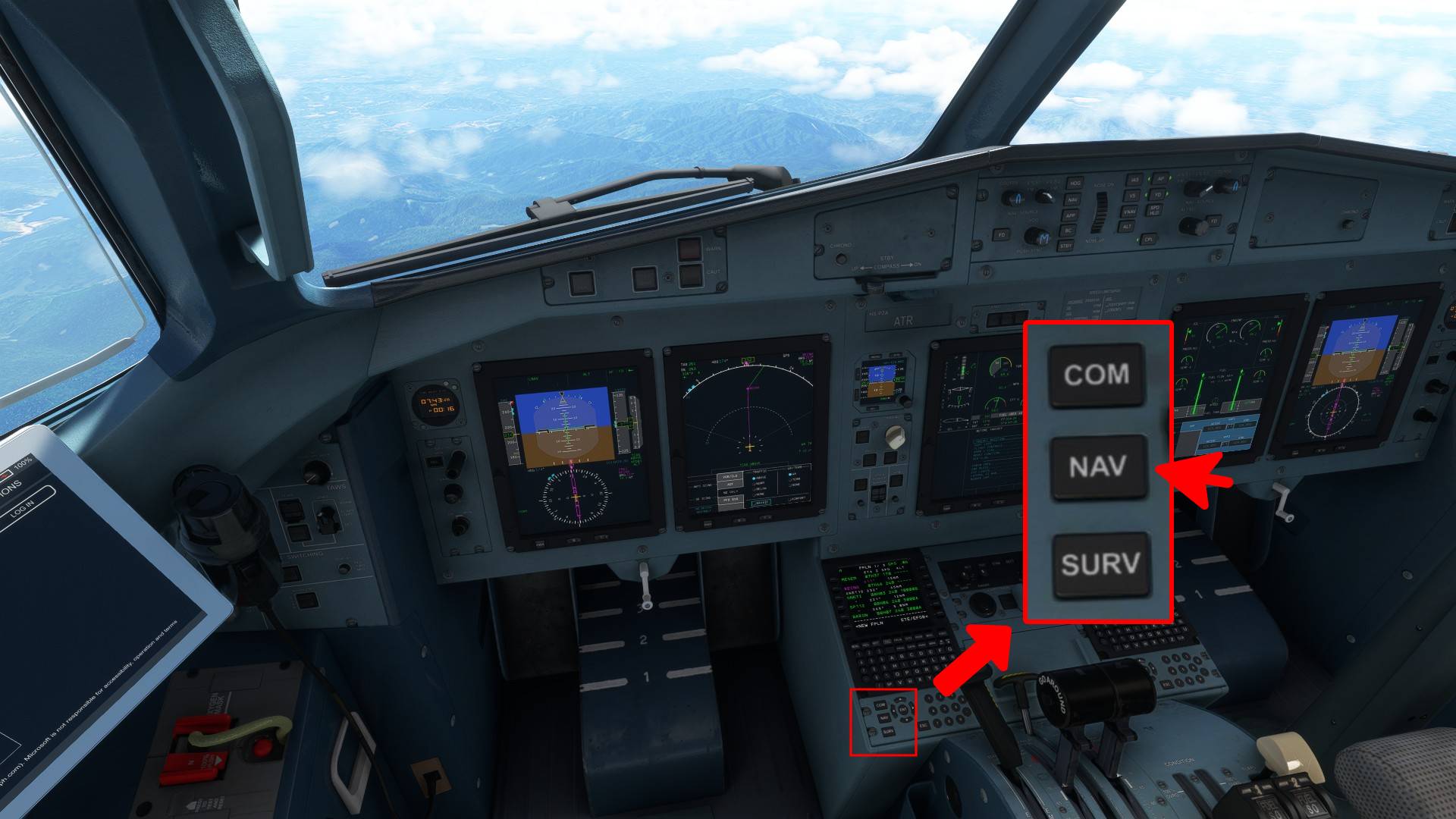
FMCの下にある「NAV」ボタンを選択します。
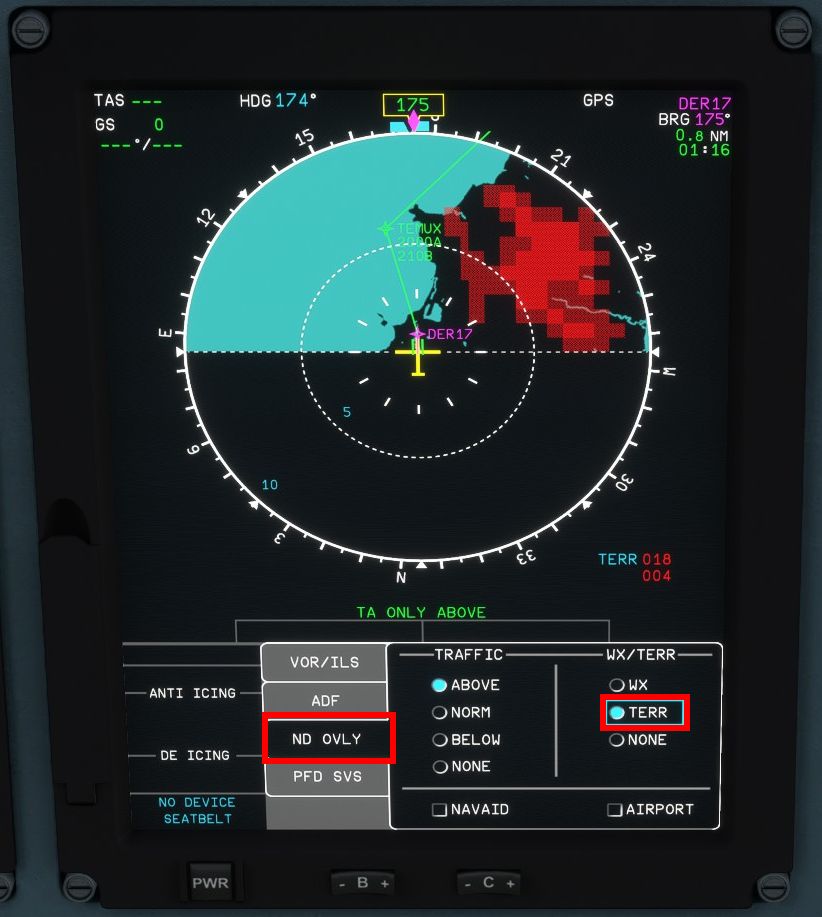
MFDへ表示された「ND OVLY」を選択し「TERR(地表レーダ)」を選択します。
スロットル下の「ND」を選択してナビ画面にしておきます。※ナビ画面になっていない場合

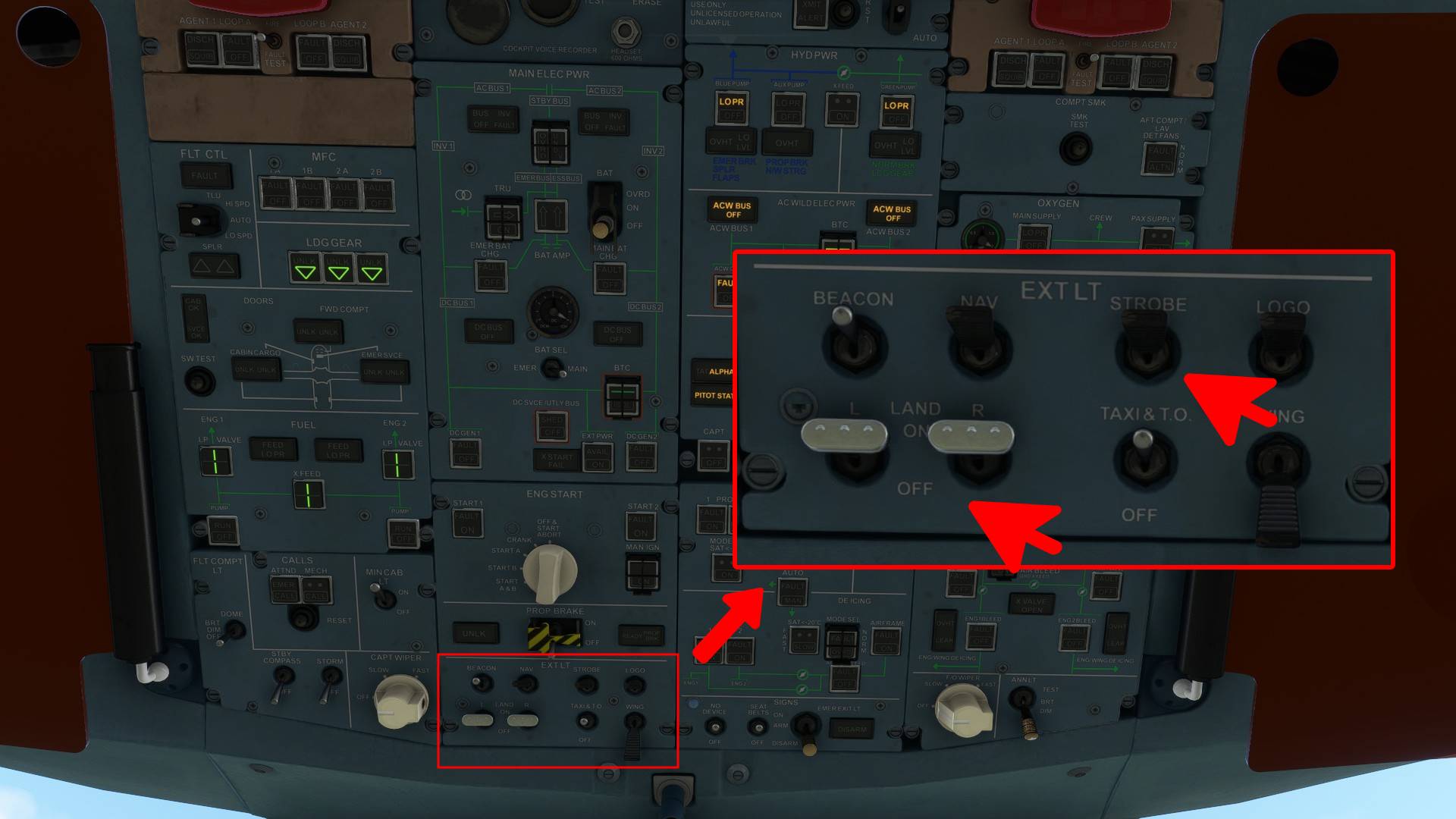
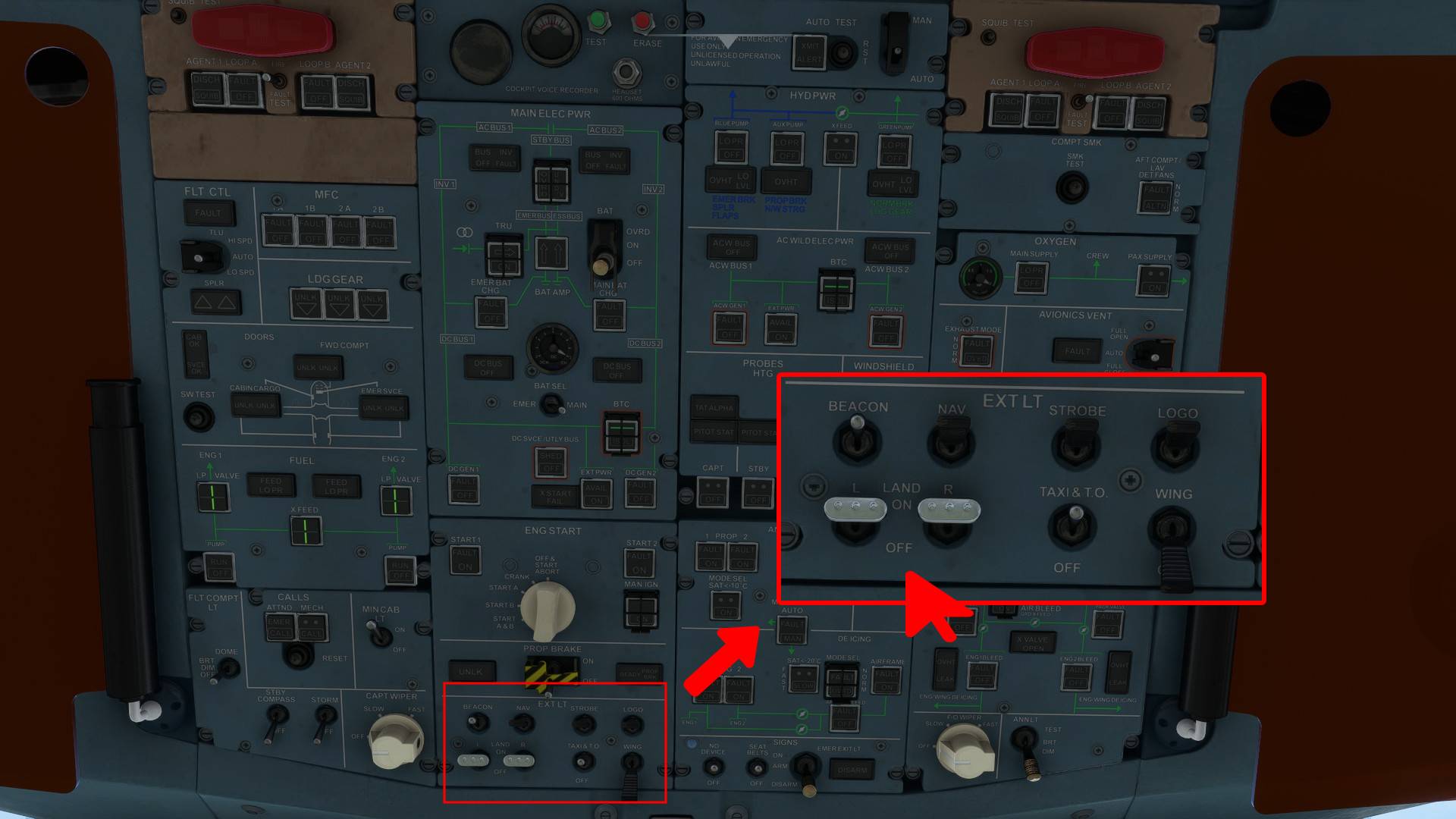
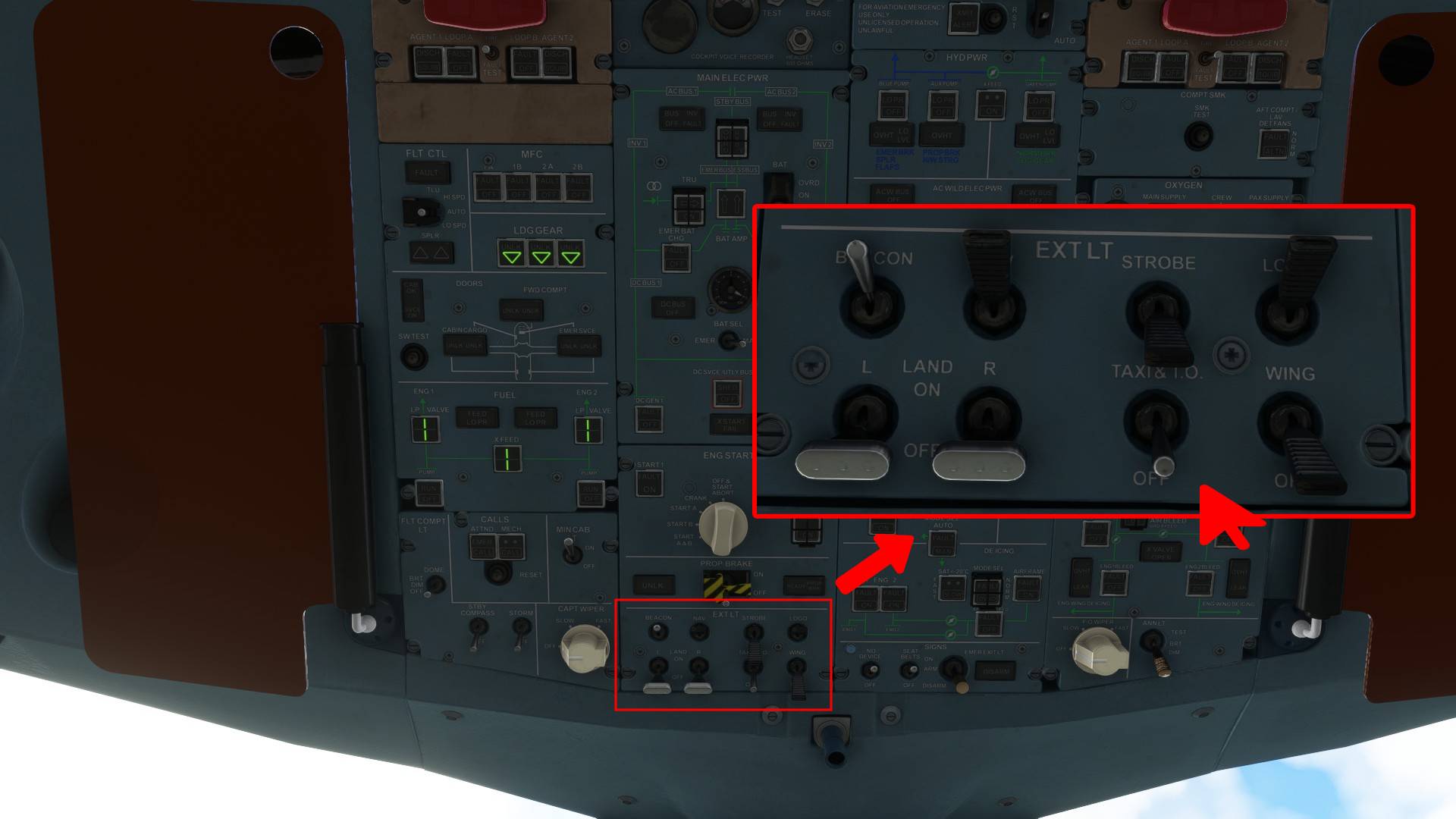
オーバヘッドパネルを表示(Ctrl+6キー)して「LAND(着陸灯)」と「STROBE(ストロボライト)」をONにします。
3.離陸
いよいよ離陸です。「パーキングブレーキ」を解除して「スロットル」を80くらいまで上げます。※通常は白い部分(ノッチ)でOKですが、サムイ島は滑走路が短いのでスロットルを高めに設定します。

速度計が「V2」を超えたらゆっくりと機首を上げます。

上昇を始めたらギアをアップしてタイヤを格納します。

オーバヘッドパネルを表示(Ctrl+6キー)して「TAXI & T.O(タキシングライト)」をOFFにします。

速度が上昇して速度計の「F」を超えたらフラップを格納します。


速度は170ノットを目安に上昇します。

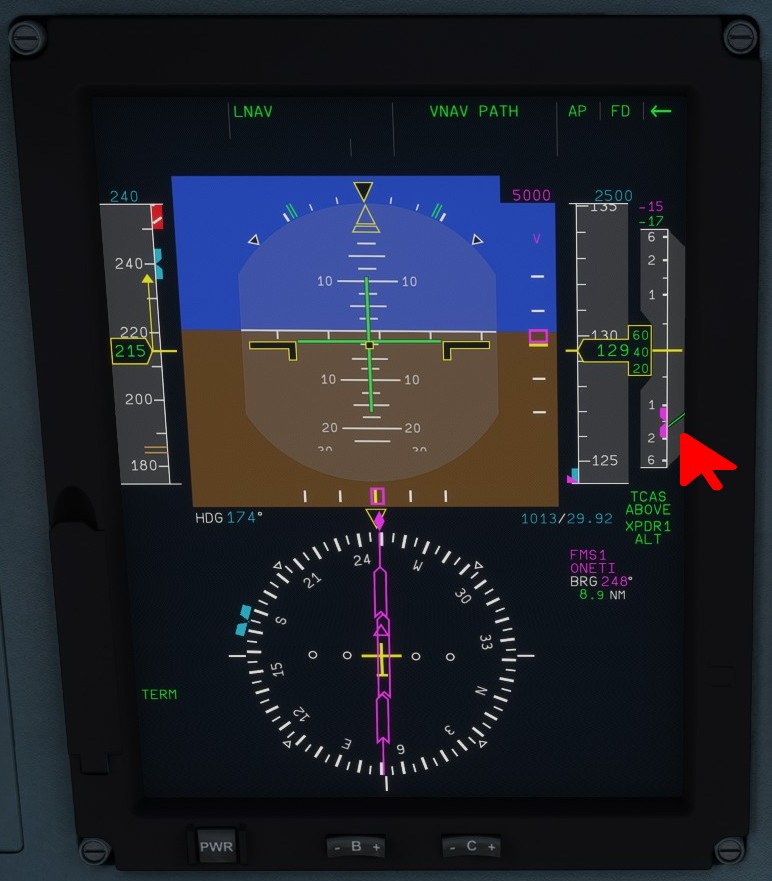
現在の姿勢で到達する速度が「黄色い矢印」で表示されるので参考にして姿勢をコントロールします。
速度が170ノットに足りていない場合は機首を下げることで速度が上がります。

速度が170ノットを超えている場合は機首を上げることで速度が下がります。

トリムを設定(調整)しているので、操縦桿の微調整で170ノットを維持できます。170ノットを維持すれば自然と機体は上昇していきます。

進行方向は、ナビ画面を見ながら最初のポイント「TEMUX」を目指して少し左に針路をとります。

4.オートパイロットで上昇
高度が1500フィートを超えたらオートパイロットを有効にします。オートパイロットの設定パネルで「AP(オートパイロットマスタースイッチ)」を選択します。

PFD上部の表示が「LNAV」「VNAV IAS」となります。

垂直方向は「VNAV IAS」によって指定した速度170ノットをキープしながら自動で上昇していきます。

進路は「LNAV」によって、設定した飛行経路に従って飛行してくれます。1つ目のポイント「TEMUX」を通過すると次のポイント「SM193」へ向かって右旋回が始まります。

高度2000フィートを超えたら、スロットルを「ノッチ(白いマークの部分)」まで下げて、「PWR MGT(パワーの管理)」ノブをへ回して「CLB(上昇)」へ設定します。

パワーが少し下がるのでエンジン音が静かになります。
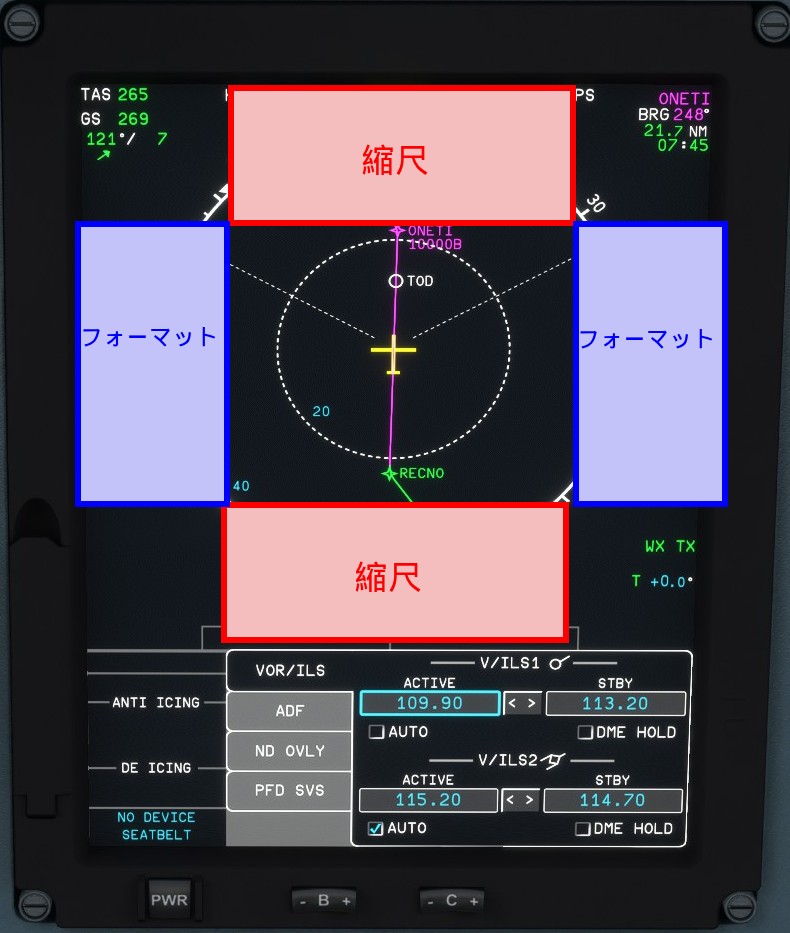
MFDでナビゲーションディスプレイを確認します。ナビ画面になっていない場合はスロットル下の「ND」を選択します。またナビゲーションディスプレイの上側、下側を選択すると縮尺が変わります。
通過ポイントである「MESEM」の少し上に白い○で13000という表記があります。これはFMCで計算された巡航高度13000フィートへの計画上の到達地点を表します。
そして水色の矢印で13000と表示されているのは現在の速度、上昇率で飛行した場合の13000フィートへの実際の到達予想地点を表します。ほぼ同じになっています。

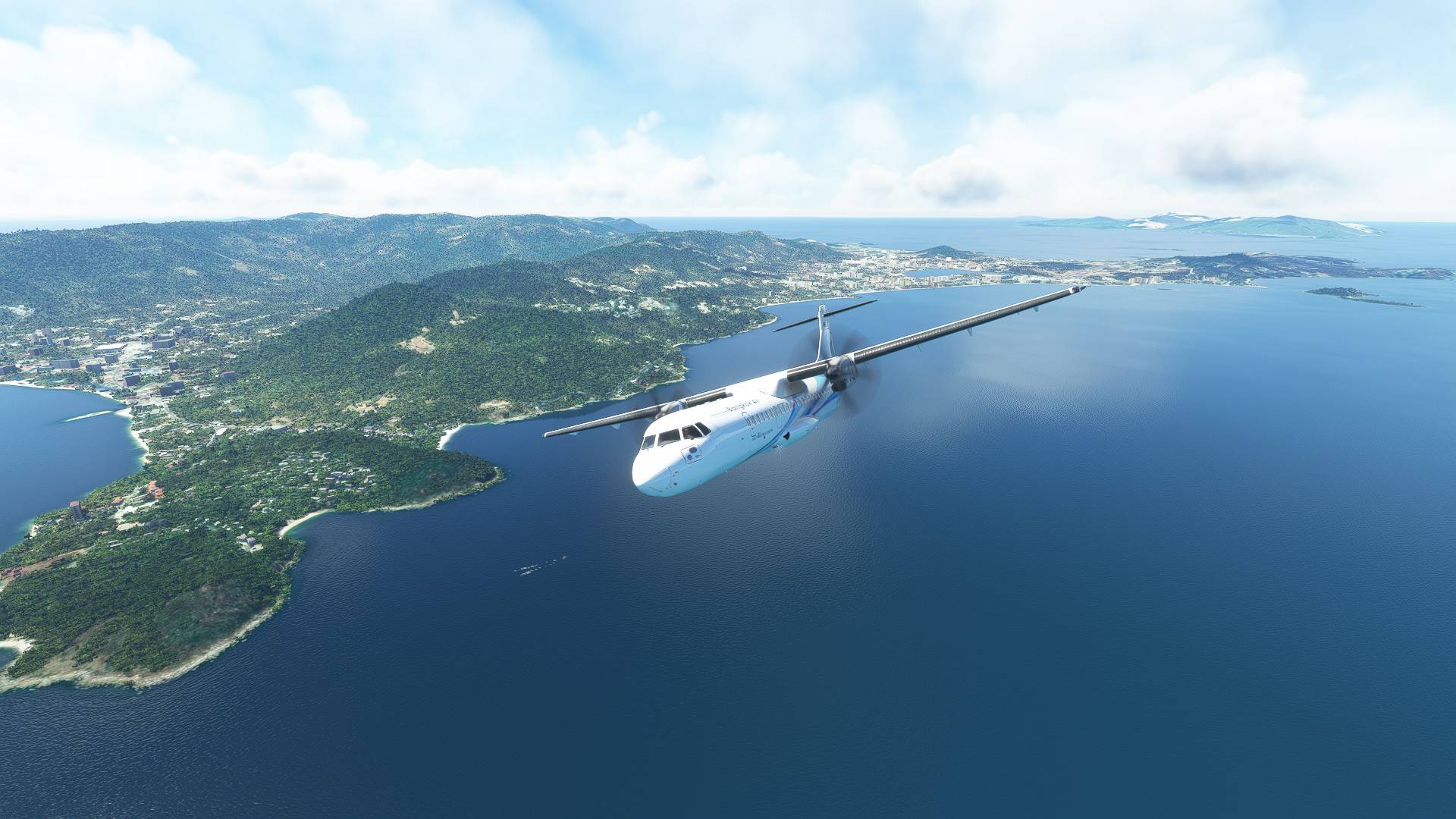
機体は13000フィートを目指して機体は上昇していきます。サムイ島を離れます。

高度が1万フィートを超えたら、オーバヘッドパネルを表示(Ctrl+6キー)して「Landing Lights(着陸灯」をOFFにします。

MFDの「ND OVLY」を選択し「WX(気象レーダ)」を選択します。

5.巡航
巡航高度の13000フィートへ到達したら「PWR MGT(パワーの管理)」ノブをへ回して「CRZ(巡行)」へ設定します。

水平飛行になったので速度が上昇します。「速度設定」ノブを回して指定速度を240へ設定します。

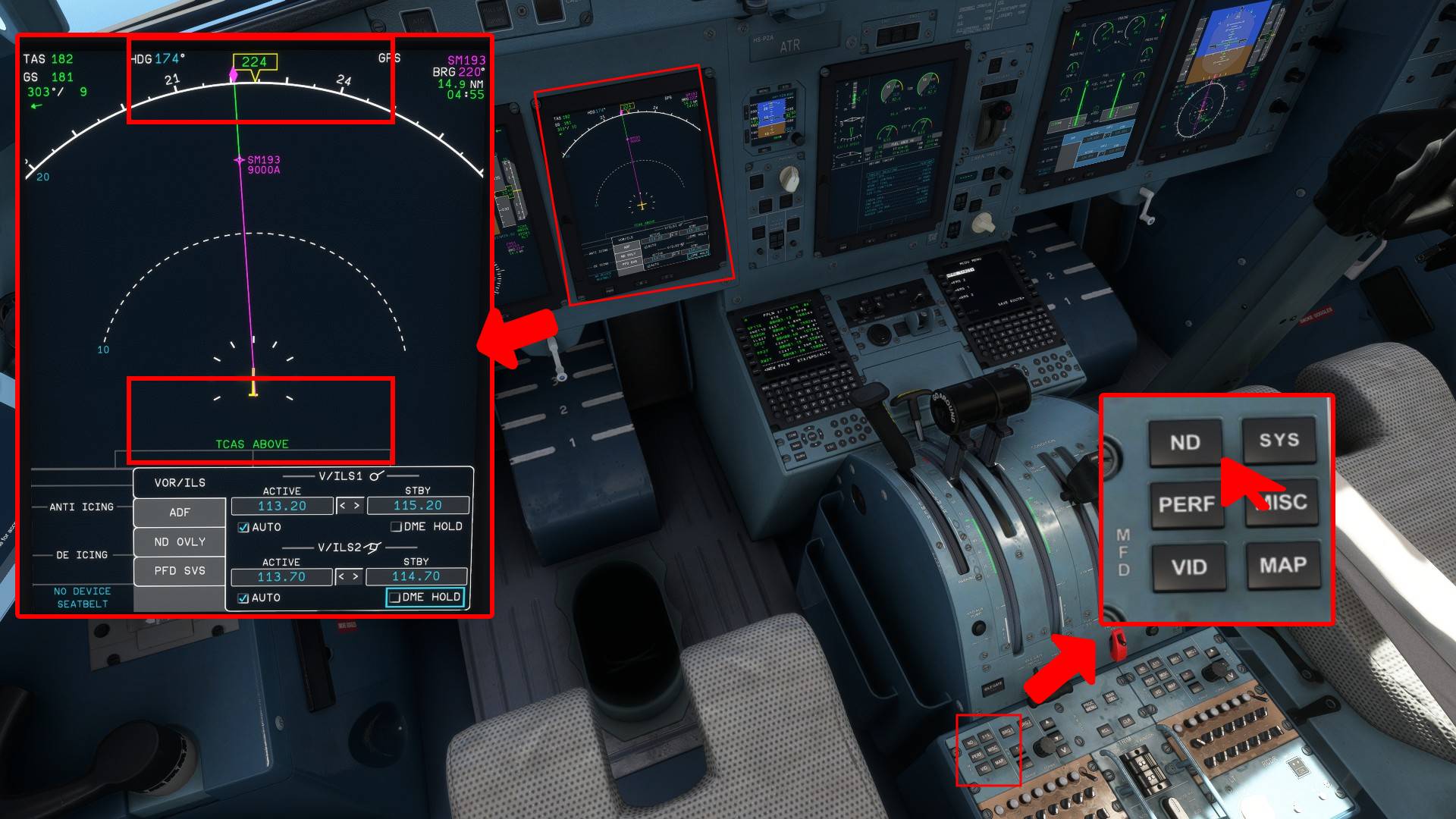
今のうちに着陸する滑走路のILS周波数を入力しておきます。
FMCの下にある「NAV」ボタンを選択します。
MFDへ表示された「VOR/ILS」を選択し「STBY」の数値を選択します。

入力モードになったらFMCの下にあるテンキーで、着陸予定のプーケット空港滑走路27のILS周波数「109.90」を入力します。※FMCのテンキーではありません。

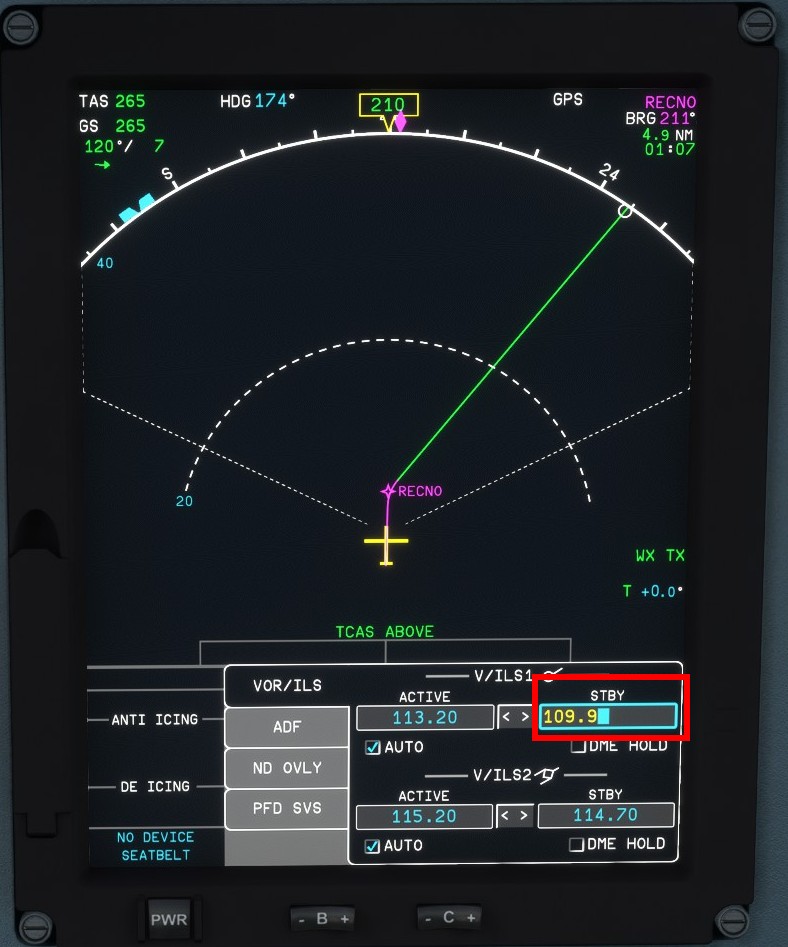
入力したら「ENT」を選択し確定させます。

中央の矢印を選択すると「ACTIVE」と「STBY」が入れ替わります。左側のACTIVEが「109.90」となっていることを確認します。

機体はインドシナ半島へ入ります。しばらくは水平飛行になるので、客席を歩き回るなり、外の景色を楽しむなりして時間をつぶします。


6.降下開始(VNAVによる降下)
ナビゲーションディスプレイに「TOD」という表示が見えてきました。降下を開始する地点です。

ナビゲーションディスプレイのフォーマットは画面の左右、縮尺は上下を選択することで変更できます。
TODまで5マイルくらいになったら、高度計に紫色の□が表示されます。

紫色の□が表示されたらVNAVで降下するための設定をします。まずはオートパイロットの設定パネルで「ALT SEL(高度設定)」ノブを回し、PFDに表示される指定高度を2500へ設定します。

次にオートパイロットの設定パネル「VNAV」を、PFD上部に表示される高度が「ALT」から「VNAV PATH」となるまで、場合によっては複数回選択します。「ALT SEL」「PITCH HOLD」が選択された状態だとすぐに降下が始まってしまうので注意してください。

TODを過ぎると、指定した2500フィートまで自動で降下が開始されます。
ATRにはオートスロットルが無いことに注意してください。降下が始まったらすぐにスロットル緑のゾーンまでを下げて、速度オーバーにならないようにします。

「PWR MGT(パワーの管理)」ノブをへ回して「TO」へ設定します。

スロットルを調整して、速度が240前後となるようにします。

高度が10000フィートを下回ったらオーバヘッドパネルを表示(Ctrl+6キー)して「Landing Lights(着陸灯」をONにします。
着陸灯が点灯します。

MFDの「ND OVLY」を選択し「TERR(地表レーダ)」を選択します。

※速度オーバーでPFD上部に表示される高度が「PITCH HOLD」となってしまった場合は、すぐにスロットルを下げてから、オートパイロットの設定パネル「VNAV」をPFD上部に表示される高度が「VNAV PATH」となるまで選択します。

7.オートパイロットによる降下と減速
ここまで離陸してからの上昇、巡行、降下までVNAVというモードで高度をコントロールしてきました。VNAVはFMCに入力された情報をもとに、自動で計算された高度、降下率によって飛行します。ここからは明示的に高度、降下率を指定する自動操縦により高度をコントロールします。
「SP112」というポイントが近づいたら「速度設定」ノブを回して指定速度を170へ設定しておきます。

「SP112」を通過して右旋回が始まったら、スロットルを緑のゾーンの一番下「FI(フライトアイドル)」の位置まで下げます。

オートパイロット設定パネルの「VS」を選択します。PFD上部の表示が「VS」に変わります。

続いて、降下率設定ノブを回して降下率(水色の数値)を「-20」に指定します。

FMCで設定した降下計画(紫の□)よりも早い降下率で機体は降下しています。

ナビゲーションディスプレイに水色の矢印で2500と表示されているのが現在の降下率で2500フィートに到達する地点です。CF27というポイントの少し手前で高度2500フィートに達するように降下率を調整します。降下率を上げると目的高度へ到達するポイントが近くなり、降下率を下げると遠くなります。

高度が3000フィート以下になったら高度計を修正します。説明は割愛しますが、簡単に言うと標高、気圧によって異なる高度を統一させるためです。キーボードの「B」を選択すると、自動で高度計が動き、高度が設定されます。
高度が2500フィートへ到達すると、降下が止まります。高度を維持するために速度が低下してしまうのでスロットルをFI(フライトアイドル)から増加させ、速度170ノットを維持するように調整します。

速度計を確認して、速度が二本線のマークを下回ったらフラップを「15」へセットします。


8.着陸の準備とILSをキャプチャ
プーケット空港の滑走路が見えてきました。ここからはILS(着陸支援システム)に誘導してもらって滑走路を目指します。

CF27というポイントを高度約2500フィートで通過したら、ILSをキャプチャします。

オートパイロットの設定パネルにあるこちらのノブを「FM1」から「V/ILS1」へ回します。

続いて「APP(アプローチ)」を選択します。

PFD上部の表示が「LOC」と「ALT/GS」に変わります。「LOC(ローカライザー)」が有効になっているので、機体はオートパイロットによって自動で滑走路方向へ向かいます。

オートパイロットの設定パネルにある「COURSE」ノブを回してPFDのCRSを「267」へ設定します。

「速度設定」ノブを回して指定速度を120へ設定します。

しばらくすると「GS」に変わり降下が始まります。「GS(グライドスロープ)」が有効になると、機体は滑走路へ向かって適切な降下率で降下していきます。
※APPを選択した高度によってはすぐに「GS」に変わります。

降下が始まったらギアをダウンして、スロットルを緑のゾーンの一番下「FI(フライトアイドル)」の位置まで下げます。

速度が二本線のマークを下回ったらフラップを「30」へセットします。


速度が120となるように、スロットルを調整します。EFDのエンジン出力が「25.0%」前後にしておくといいと思います。※機体重量により異なります。

最終の着陸態勢です。機体はILSによって自動的に滑走路へ向かって降下していきます。

ILSについては、こちらの記事も参考にしてください。
9.オートパイロットの解除と着陸
高度が1000フィート付近まで降下したら、自動操縦を解除して手動で着陸します。「AP(オートパイロット)」をOFFにします。同時に「YD(ヨーダンパー)」もOFFにします。

目の前の滑走路と、PFDに表示されたILSの信号を見ながら、機首の上下と左右をコントロールしながら滑走路を目指します。
左右方向は水色の◇を確認します。水色の◇が中央より左にある場合は滑走路は機体よりも左にあります。つまり滑走路から右にずれています。中央より右にある場合は滑走路は右、つまり機体は左にそれています。


高度は水色の◇を確認します。水色の◇が中央より上にある場合は理想の高度は機体よりも上にあります。つまり高度が下がりすぎです。中央より下にある場合は理想の高度は下、つまり機体の高度は高すぎます。


ILSの信号(◇)が左右、上下共に中央に来るように調整します。
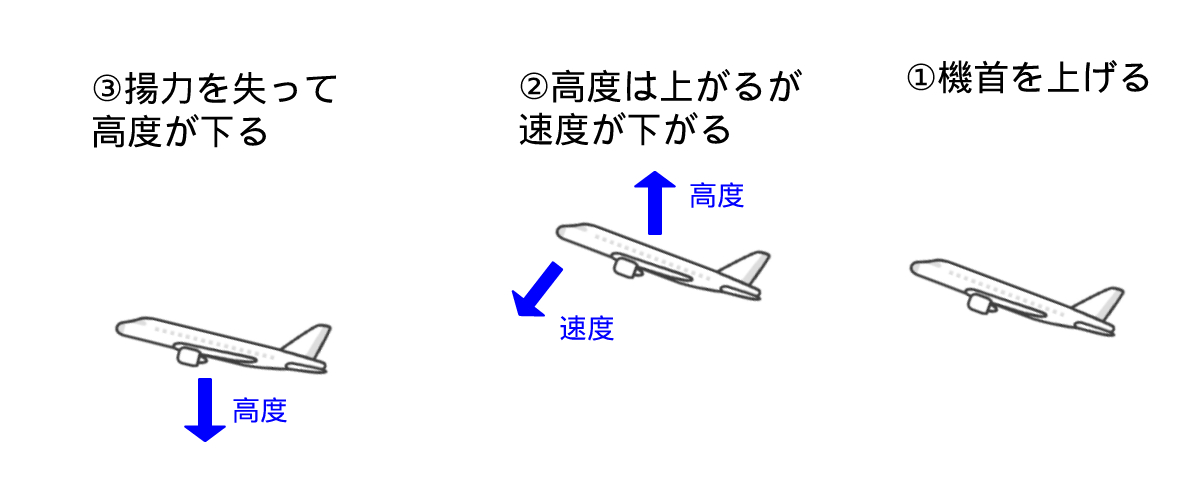
高度の微修正は機首の上げ下げで修正しますが、姿勢が水平ではなく機首が上がった状態、下がった状態になる場合はエンジン出力で降下率を調整します。機首が下がった状態だと高度は下がりますが速度が上がってしまい、接地の時に機首を上げると機体は上昇してしまいます。
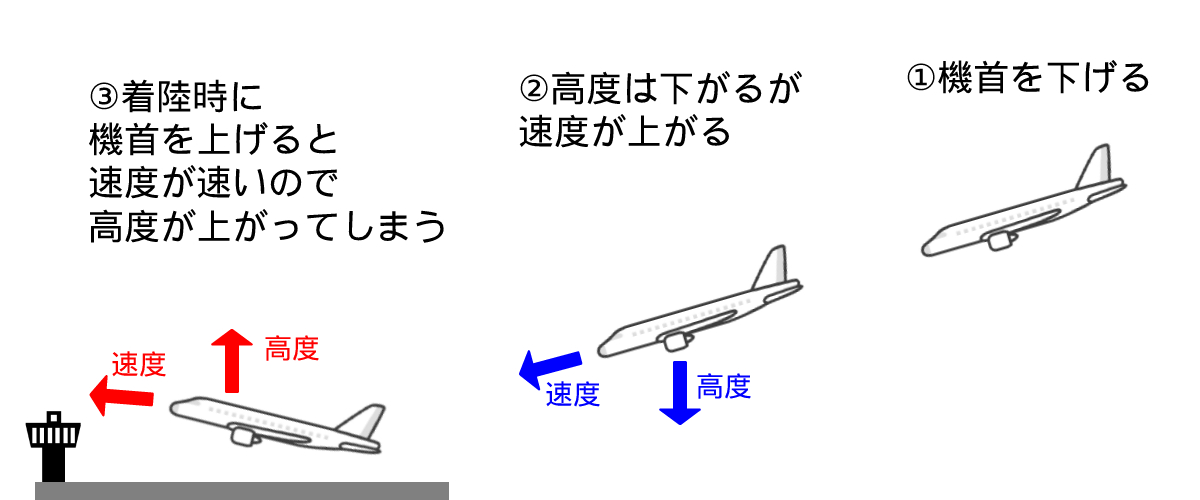
機首を上げると一時的に高度は上がりますが、空気抵抗が増えるので速度が下がり、結果として高度が下ってしまいます。
もうひとつの目印は「PAPI」という灯火で、赤と白の数で適正な進入角度(高度)を教えてくれます。
白2,赤2が見えているのがちょうどいい進入角度、白の数が多く見えると高すぎる、赤の数が多く見えると低すぎる状態です。
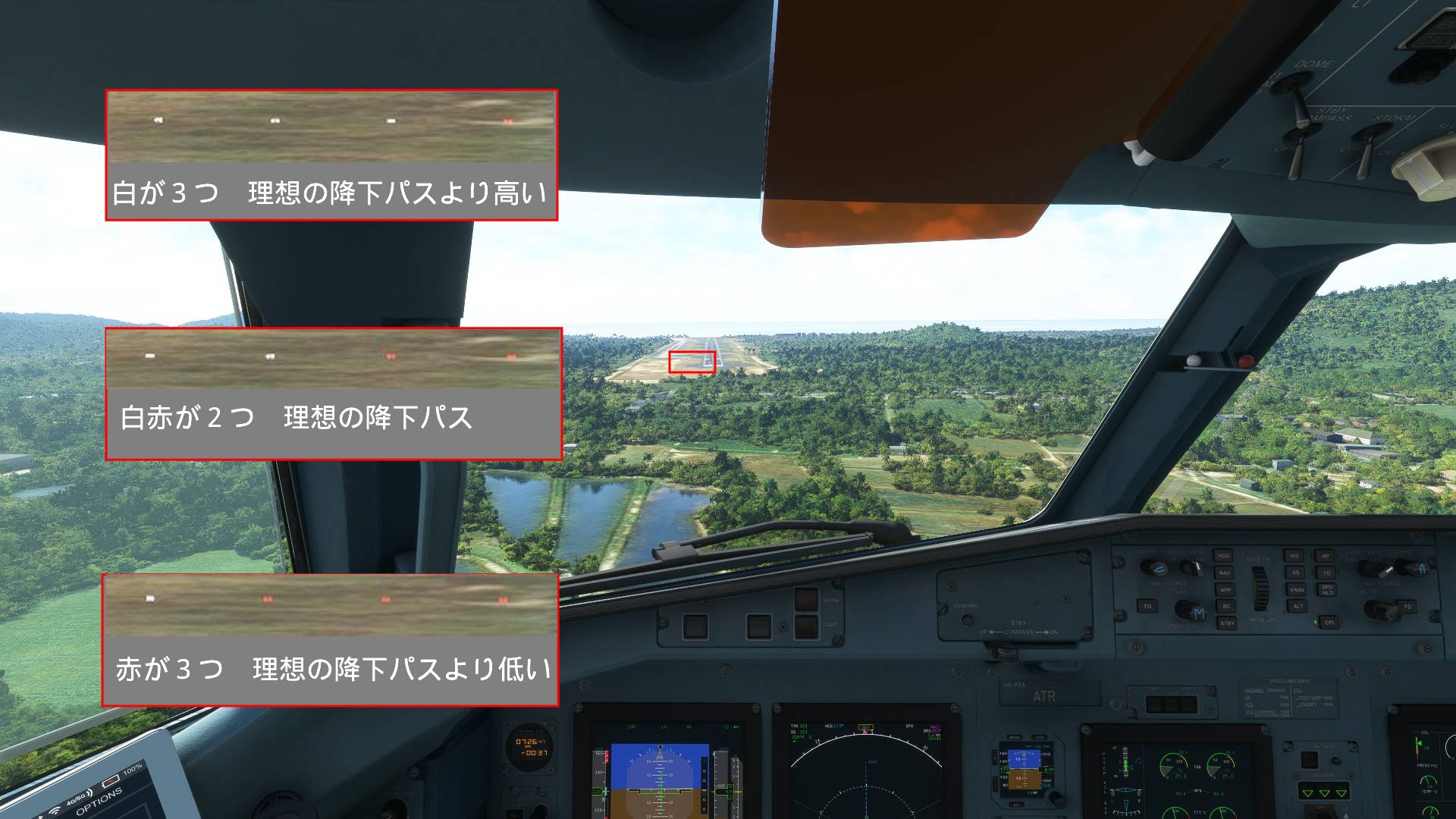
解説のためにILS、エンジン出力、PAPIについて説明しましたが、滑走路近くまで自動操縦で誘導されていたので、大きくコントロールをする必要はありません。滑走路の設置点(太い白い四角)を目指して、左右(方向)、上下(高度)、エンジン出力ともに少しずつ調整すればOKです。

滑走路が近づくと高度の読み上げが始まります。高度30フィートになったら、「F1」キーでエンジン出力をゼロ(アイドル)にします。高度10フィートになったら接地の衝撃を抑えるために機首を少し上げて、降下率を下げて滑走路へ接地させます。この接地直前の機首上げをフレアといいますが、ATRは他の機体よりもフレアで機首を上げ過ぎると尻もちをついてしまいます。

後輪が接地したらゆっくりと機首を下げて前輪を接地させます。「F2」キー(エンジン出力減少)を押し続けると、プロペラが逆回転して速度が落ちます。速度が50ノットくらいになったら、「F1」キーでエンジン出力をゼロ(アイドル)にして ブレーキで速度を緩めます。
プーケット空港には誘導路が少ないので早めに速度を落としすぎないようにして、少し先にある誘導路へ出ます。

10.エンジン停止とシャットダウン
誘導路へ出たらオーバヘッドパネルを表示(Ctrl+6キー)して「TAXI & T.O(タキシングライト)」をON、「Landing Lights(着陸灯」と「STROBE(ストロボライト)」をOFFにします。

フラップをアップします。

他機に気を付けながらゆっくりと駐機場へ向かいます。

駐機場へ到着したらパーキングブレーキをセットします。

スロットルがGI(グランドアイドル)になっていることを確認して「ガストロック(スロットルの動きを制限するレバー)」を有効(手前に引く)にします。

オーバヘッドパネルを表示(Ctrl+6キー)して「TAXI & T.O(タキシングライト)」をOFFにします。
「コンディションレバー1,2」を「FTH(フェザー)」位置にします。

地上電源へ接続するまでは「ホテルモード(プロペラを回さずにエンジンのみを回して発電する)」を使用して電源を確保します。オーバヘッドパネルを表示(Ctrl+6キー)して「PROP BRK(プロペラブレーキ)」のカバーを開けてレバーを「ON」へ動かして、カバーを閉じます。

第2エンジンのプロペラが停止したことを確認します。プロペラは停止していますがエンジンが回っています。

「EFB(タブレット)」を表示(Ctrl+3キー)して「AIRCRAFT」の項目から「GROUND POWER」を選択します。

オーバヘッドパネルを表示(Ctrl+6キー)の「EXT PWR(外部電源)」をONにします。

外部電源が使用できるようになったのでエンジンを停止します。「コンディションレバー1,2」を「S.O」位置にします。

第1エンジンのプロペラが停止したことを確認します。

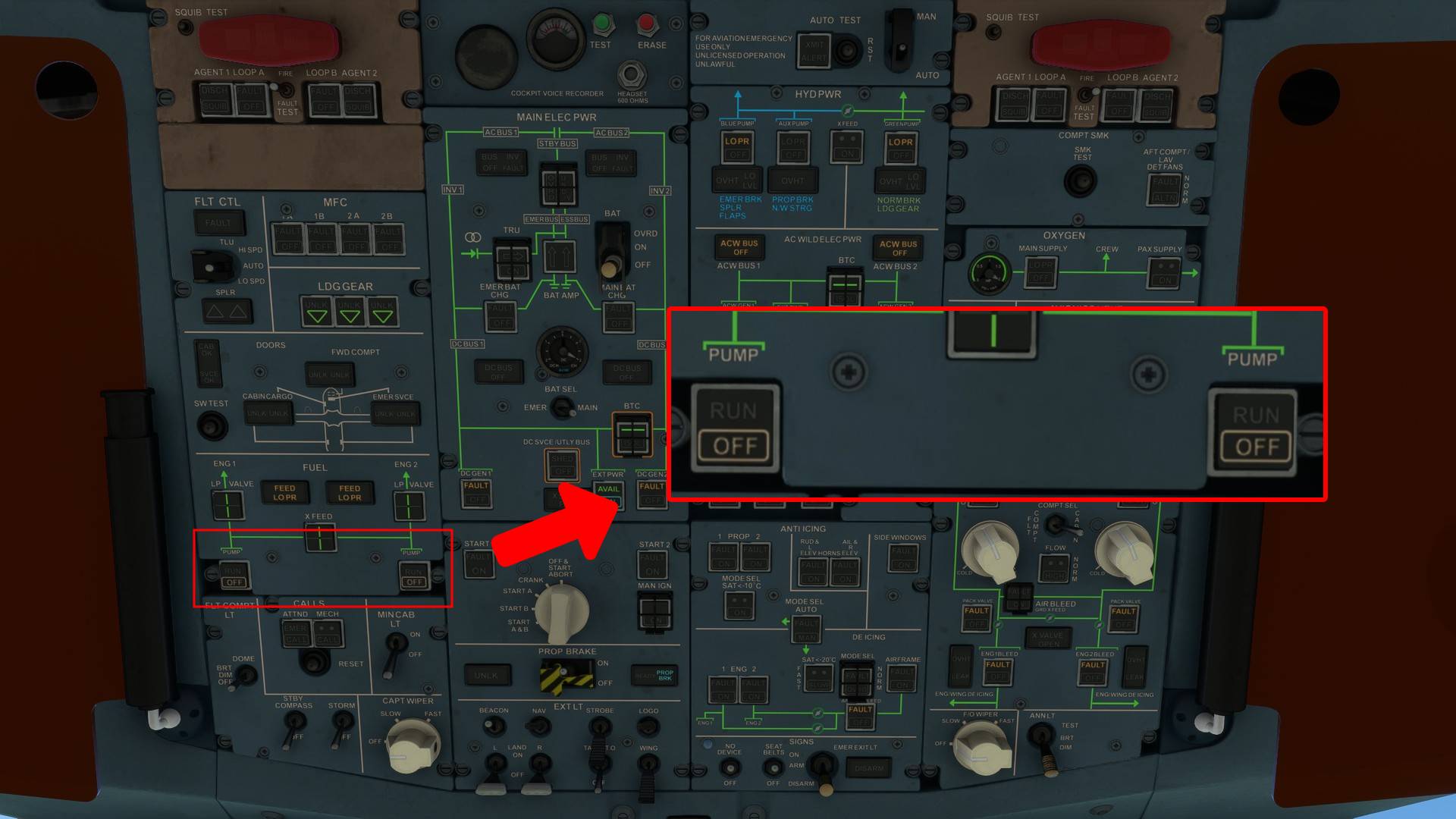
オーバヘッドパネルのENG1とENG2の「PUMP(燃料ポンプ)」を選択してOFFにします。
そのままオーバヘッドパネルの「BEACN(ビーコンライト)」をOFFに、「PROP BRK(プロペラブレーキ)」を「OFF」にします。

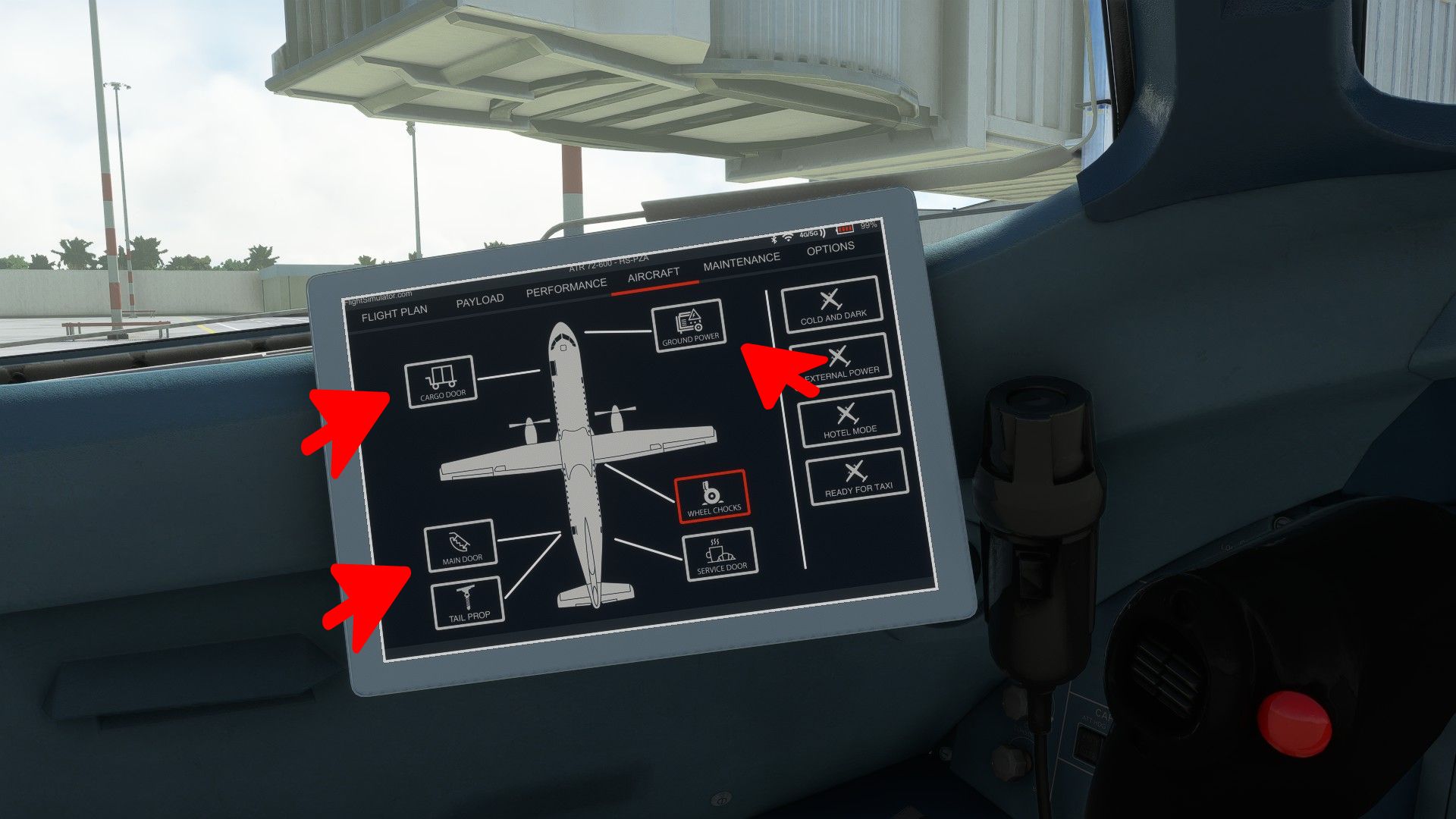
エンジンが停止したので乗客と荷物を下ろしましょう。「EFB(タブレット)」を表示(Ctrl+3キー)して「AIRCRAFT」の項目から「CARGO DOOR」「MAIN DOOR」「WHEEL CHOCKS(車止め)」をアクティブにします。

ドアが開きました。

オーバヘッドパネルの「EMER EXIT LT(緊急脱出灯)」「SEAT BELTS(シートベルトサイン)」「NO DEVICE(デバイス使用禁止灯)」をOFFにします。

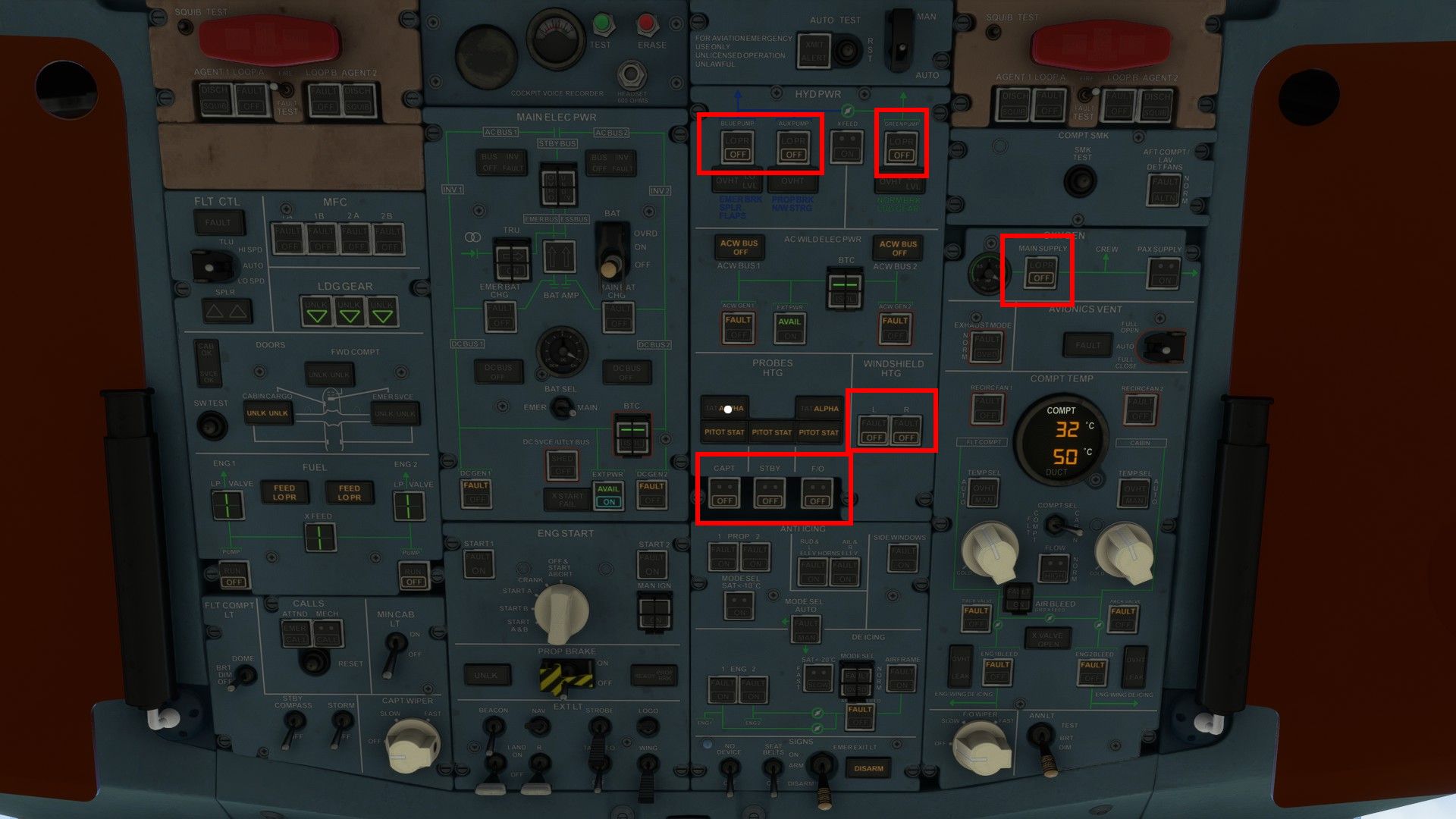
そのまま「HYD PWR(油圧系統)」「WIND SHIELD HTG(窓のヒート)」「OXYGEN(酸素系統)」「PROBES HTG」をOFFにします。
機体を離れる前にシャットダウンします。
中央にある「Weather Radar(気象レーダ)」ノブを「OFF」へセットします。

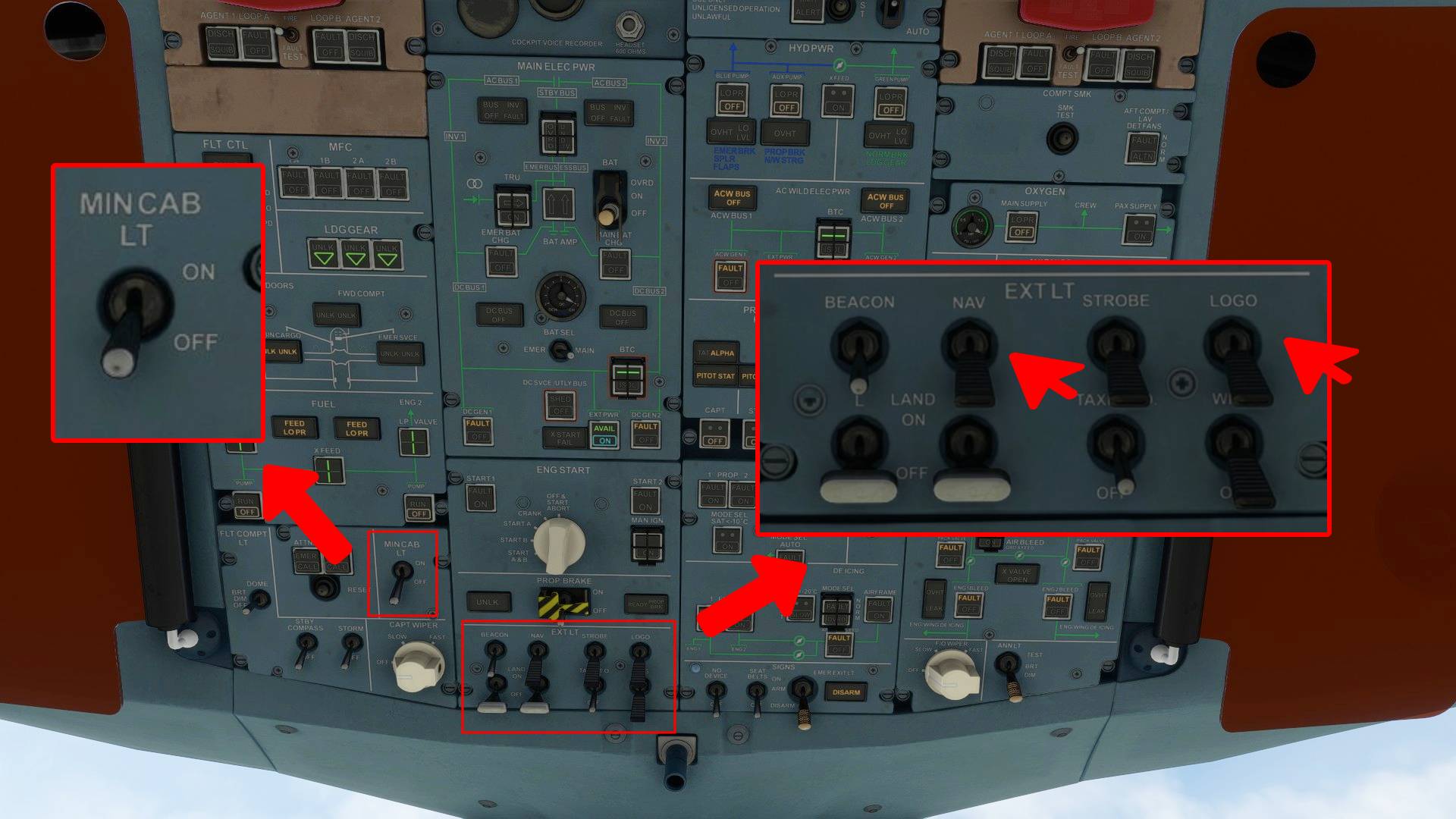
オーバヘッドパネルの「MIN CAB LT(客室灯)」「NAV」「LOGO」ライトをOFFにします。
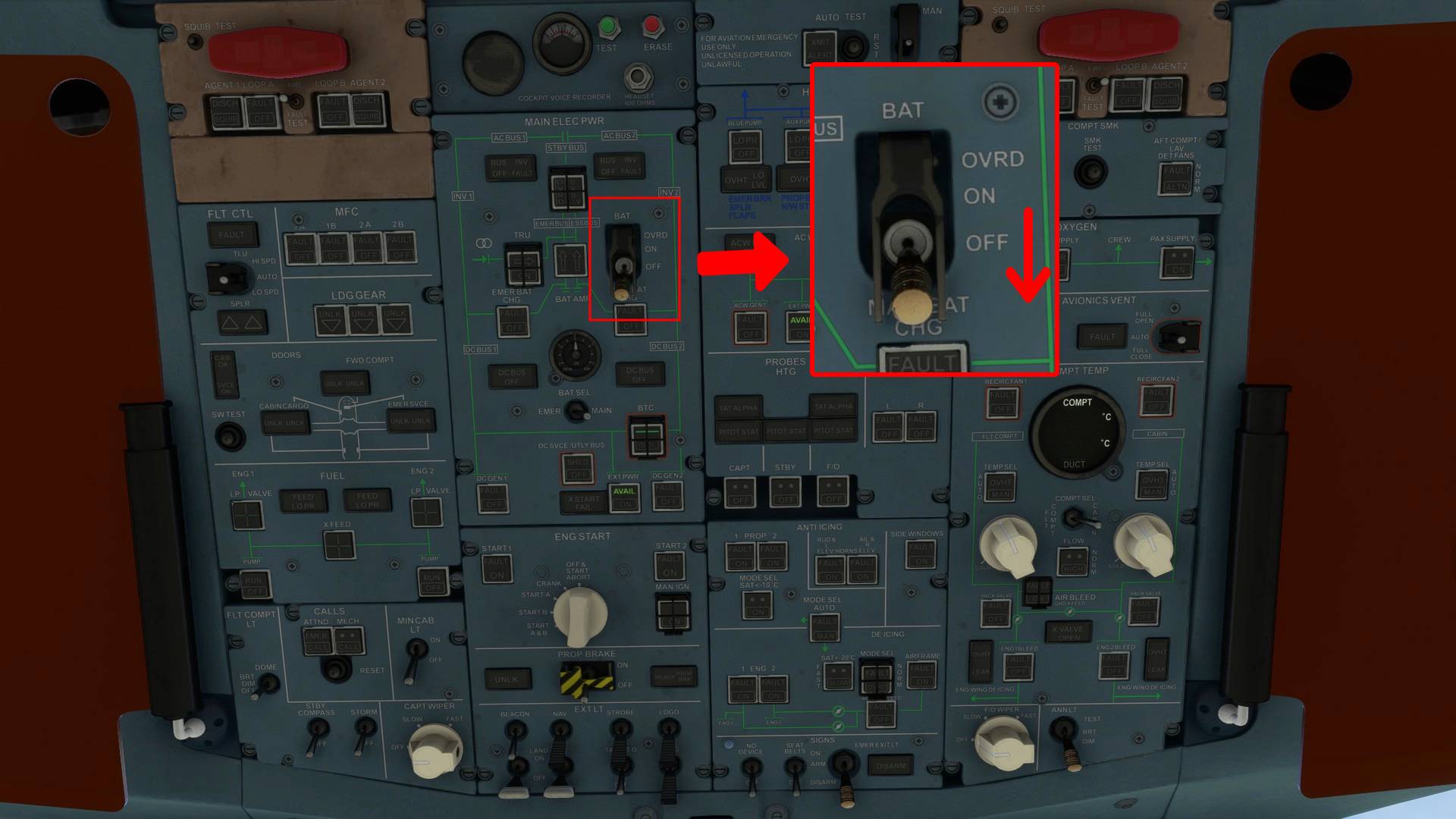
最後に「BAT(主電源)」をOFFにします。
「EFB(タブレット)」を表示(Ctrl+3キー)して「AIRCRAFT」の項目から「GROUND POWER」「CARGO DOOR」「MAIN DOOR」をOFFにします。
電源も落ちてドアも閉まりました。飛行お疲れさまでした。

2回にわたってATRの操縦方法を解説しました。初心者向けの簡易的な手順ですが、基本的な操縦はできると思います。世界のいろいろな空路を飛行してみてください。また今後のアップデートで手順通りに動作しなくなることもあると思います。うまくいかない場合はコメントをお待ちしています。
Comments