
MSFSのFlyByWire A32NXの操作方法を解説します(前回の続き)。福岡空港から関西空港までを飛行しながら、今回はタキシング、離陸、LNAVを使用した巡行、VNAVを使用した下降、ILSを使用した着陸からエンジン停止までを解説します。初心者向けに最低限の設定、操作のみの手順となりますので、実際の手順、飛行経路、高度とは異なります。また専門用語などは分かりやすい言葉に置き換えています。
※アップデート等で操作や画面が異なっている場合はコメントいただけると幸いです。
目次
- 0.前輪(ノーズギア)の設定 ※初回のみ
- 1.タキシング
- 2.離陸の前に
- 3.離陸
- 4.上昇
- 5.巡行と降下準備
- 6.降下
- 7.降下(10,000フィート以下)
- 8.減速とアプローチ
- 9.ILSキャプチャ
- 10.着陸
- 11.着陸後の操作
- 12.エンジン停止
- 補足.速度の指定(マネージドモードとセレクレッドモード)
0.前輪(ノーズギア)の設定 ※初回のみ
滑走路へタキシングを始める前にA32NX特有の前輪の設定をします。MSFSの他の機種ではラダーに連動して前輪が回転しますが、A32NXでは最大 6° までしか回転しないのでタキシングができません。
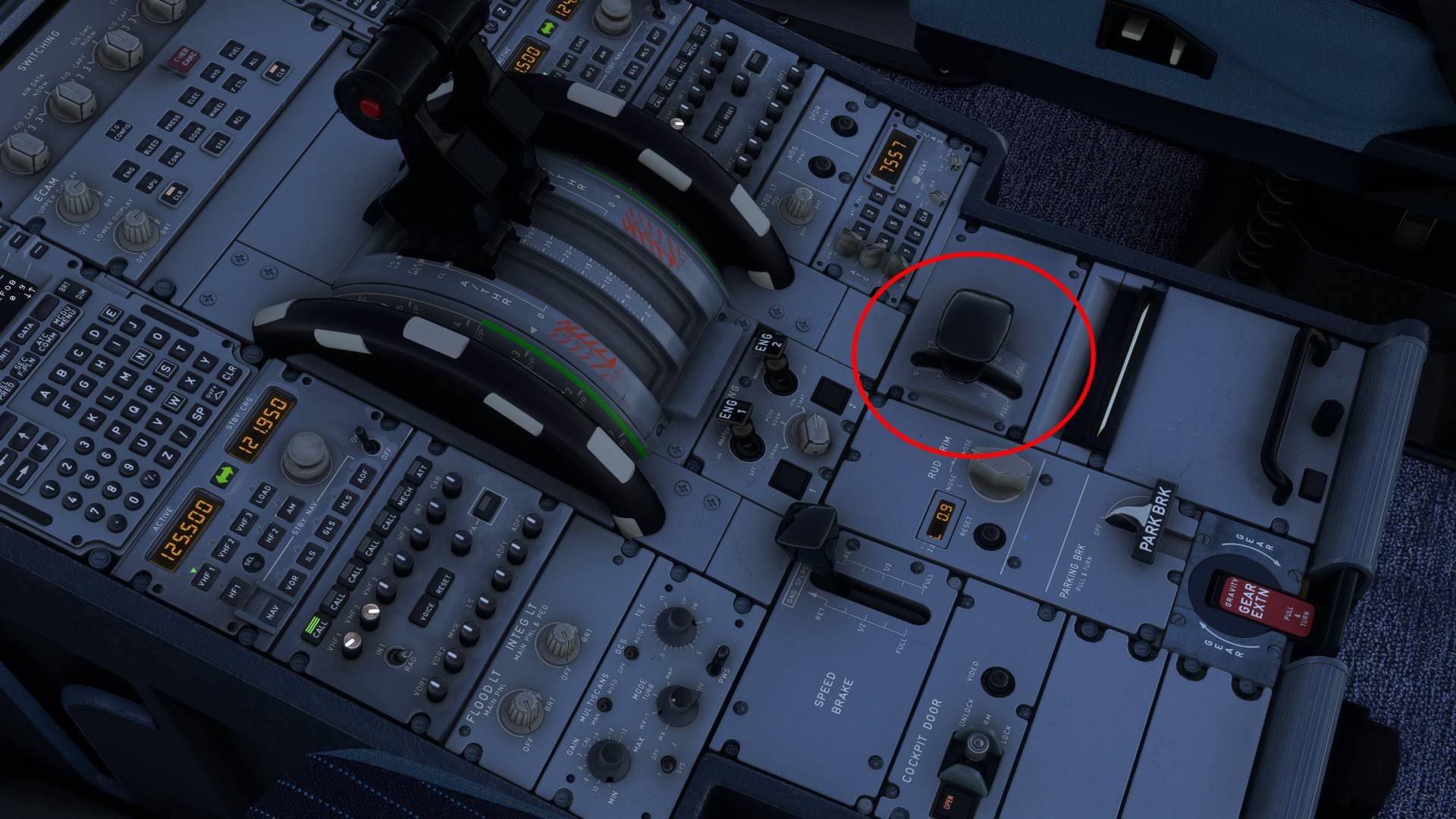
そこで独立した前輪の操作にキーを割り当てます。
キー設定で「NOSE WHEEL STEERING AXIS」を探してキーを割り当てます。
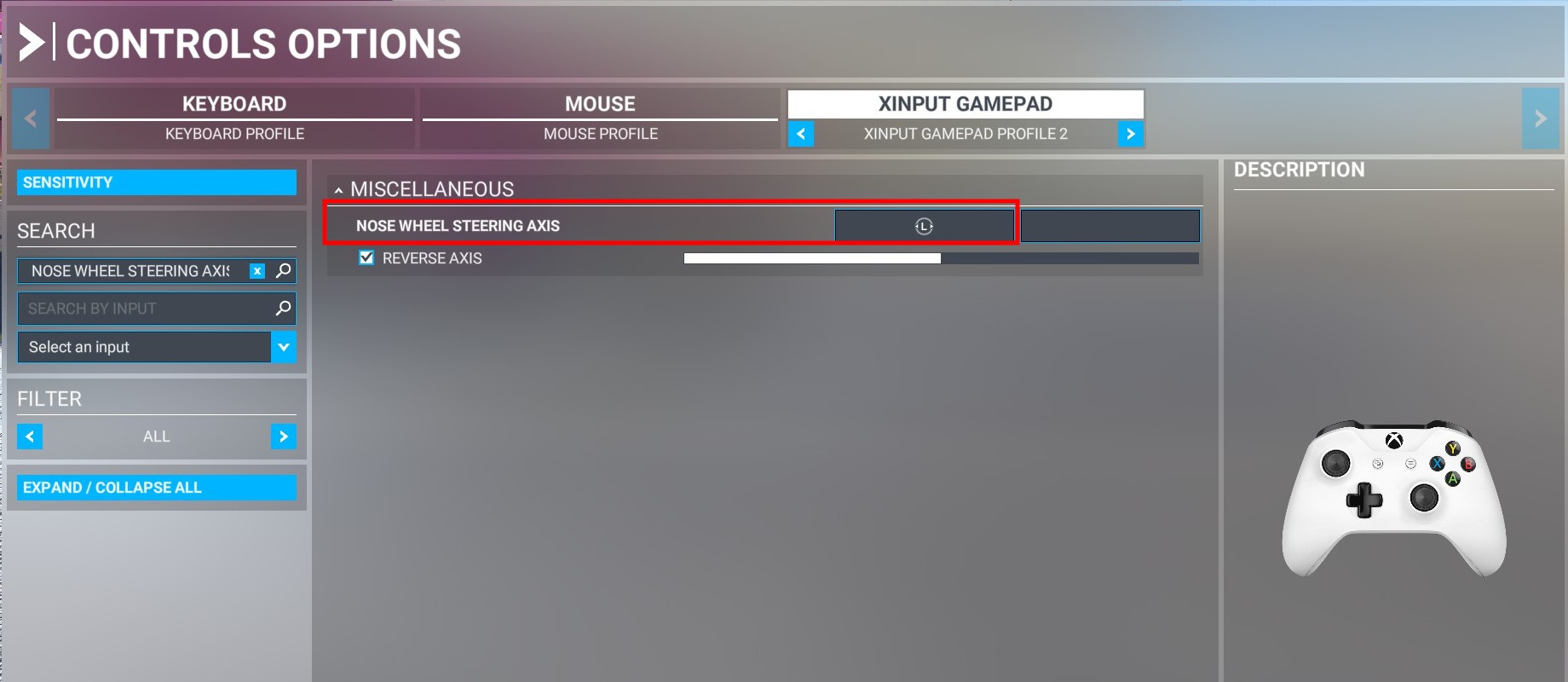
キーボードやコントローラのボタンへの割り当てもできますが、スティックなどのAxis(軸)へ割り当てることをお勧めます。前輪を回すのはハンドル操作と同じなので段階的な入力(スティックの傾き)ができ、自動で元に戻るアナログ入力でないと操作が難しいです。
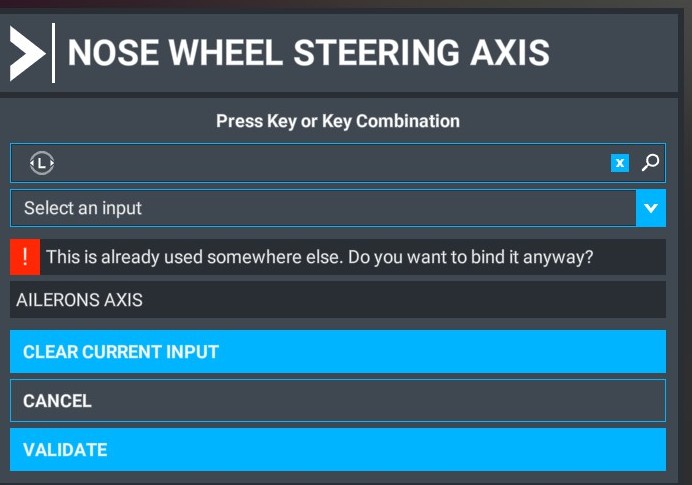
私はPS4のコントローラで操作していますが、左スティックへ割り当てました。エルロンの操作と重複しているので割り当てようとすると以下の「他操作との重複」を警告するメッセージが表示されますが、エルロンは離陸後、前輪は地上のみでしか使わないので割り切っています。
次にflyPadの「設定」-「リアリズム」で「ティラーをラダー入力から分離」を「ON」にします。
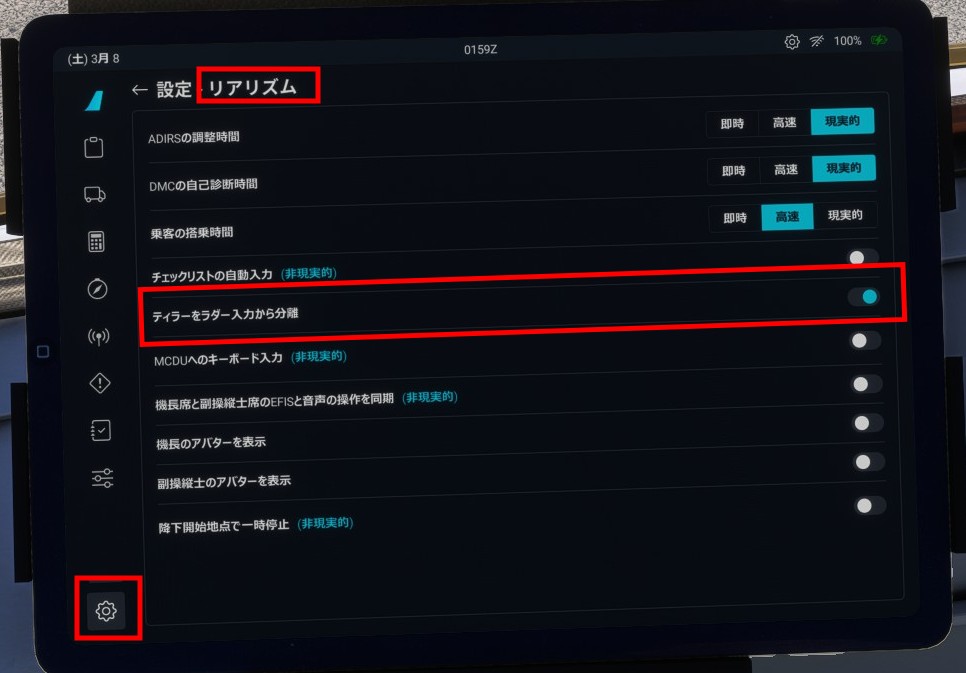
これで、地上滑走中も前輪が回転するようになります。

1.タキシング
滑走路へ向かってタキシングを開始する前にいくつかやることがあります。
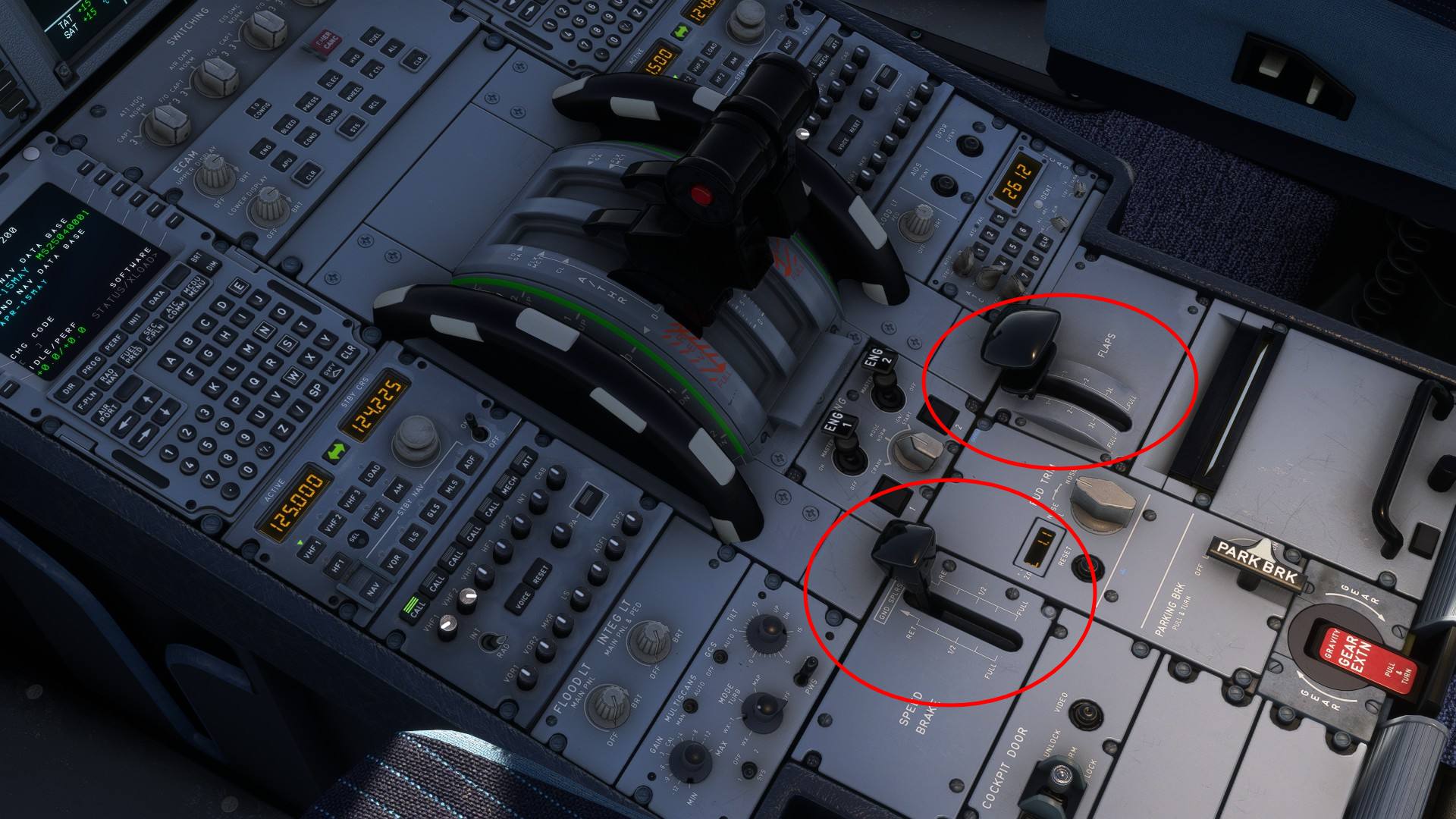
① フラップ設定
フラップを「1」に設定します。

② ピッチトリム設定
MCDUの「FUEL PRED」を選択し、CGの値を確認します。
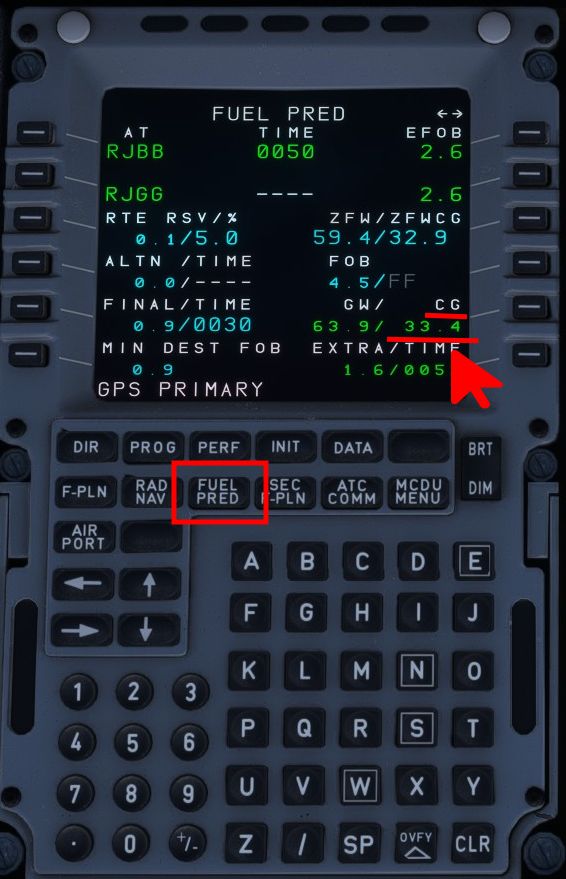
スロットルレバー左のトリムホイールでピッチトリムをセットします。CGに記された数字(おおよそ)を白い△に合わせます。

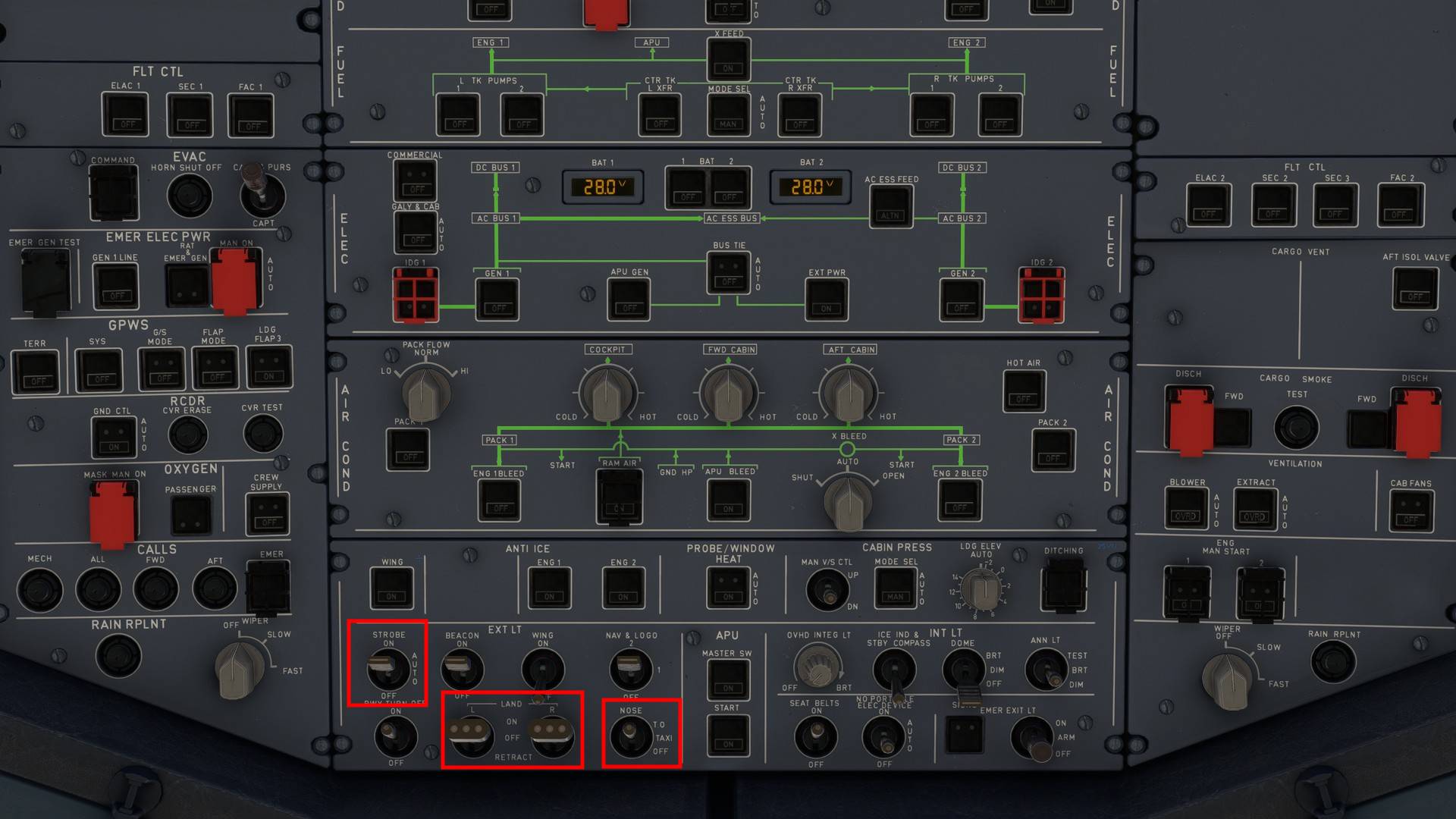
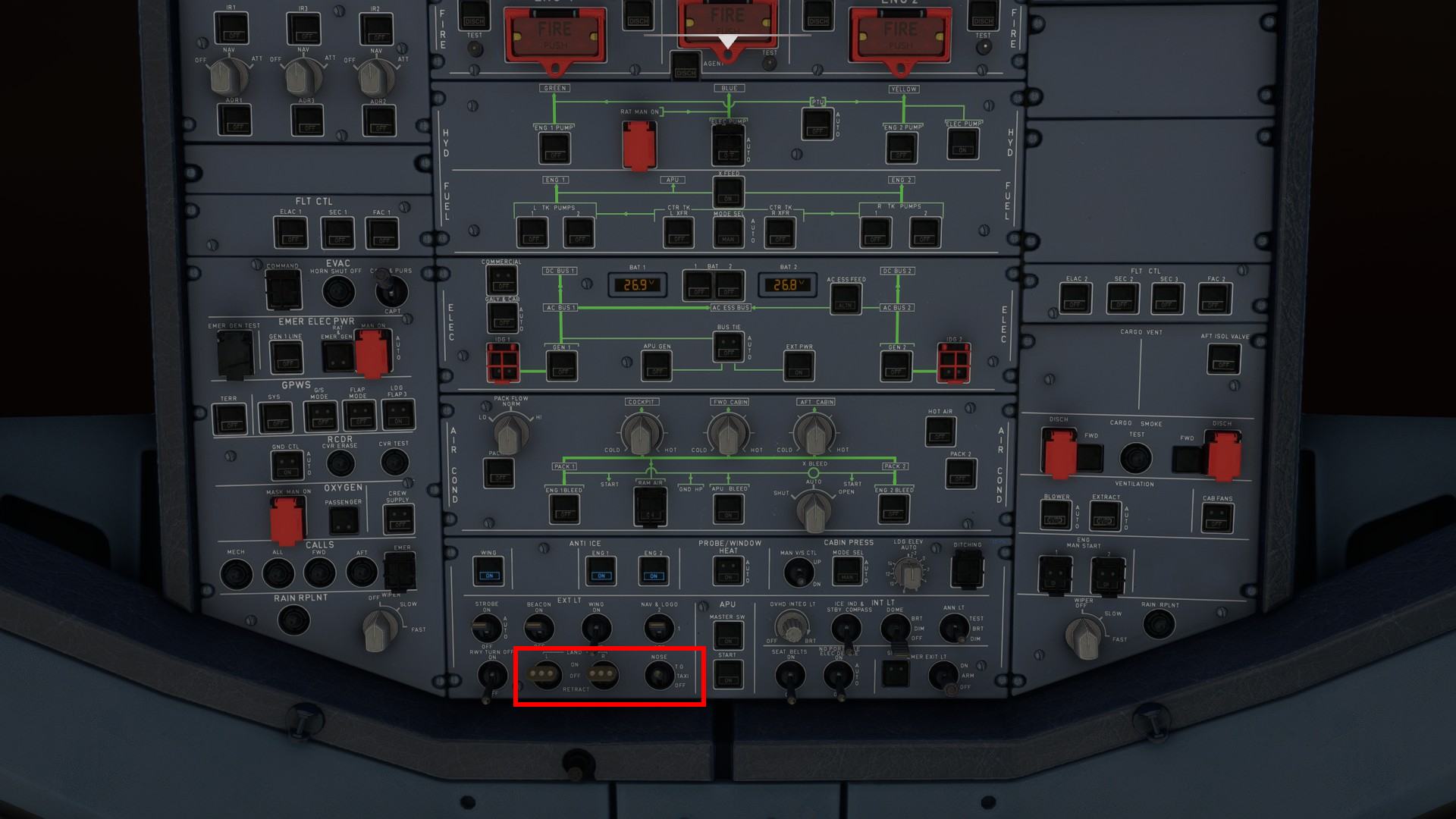
③ ライト設定(滑走灯)
「NoseLights」を「TAXI」に、「RWY Turn Off Lights」を「ON」 に設定します。


これでタキシングの準備は完了です。
パーキングブレーキを解除し少しだけスロットルを上げると、機体が動き出します。滑走路に向かってゆっくりとタキシングをします。

滑走路手前で一度停止します。

2.離陸の前に
離陸前の最後の手順です。
① 地形表示の設定
「Terrain on ND」(地形表示)をONにします。

② トランスポンダー(自機の情報[高度、識別番号など]を返信する装置)とTCAS(衝突防止装置)の設定
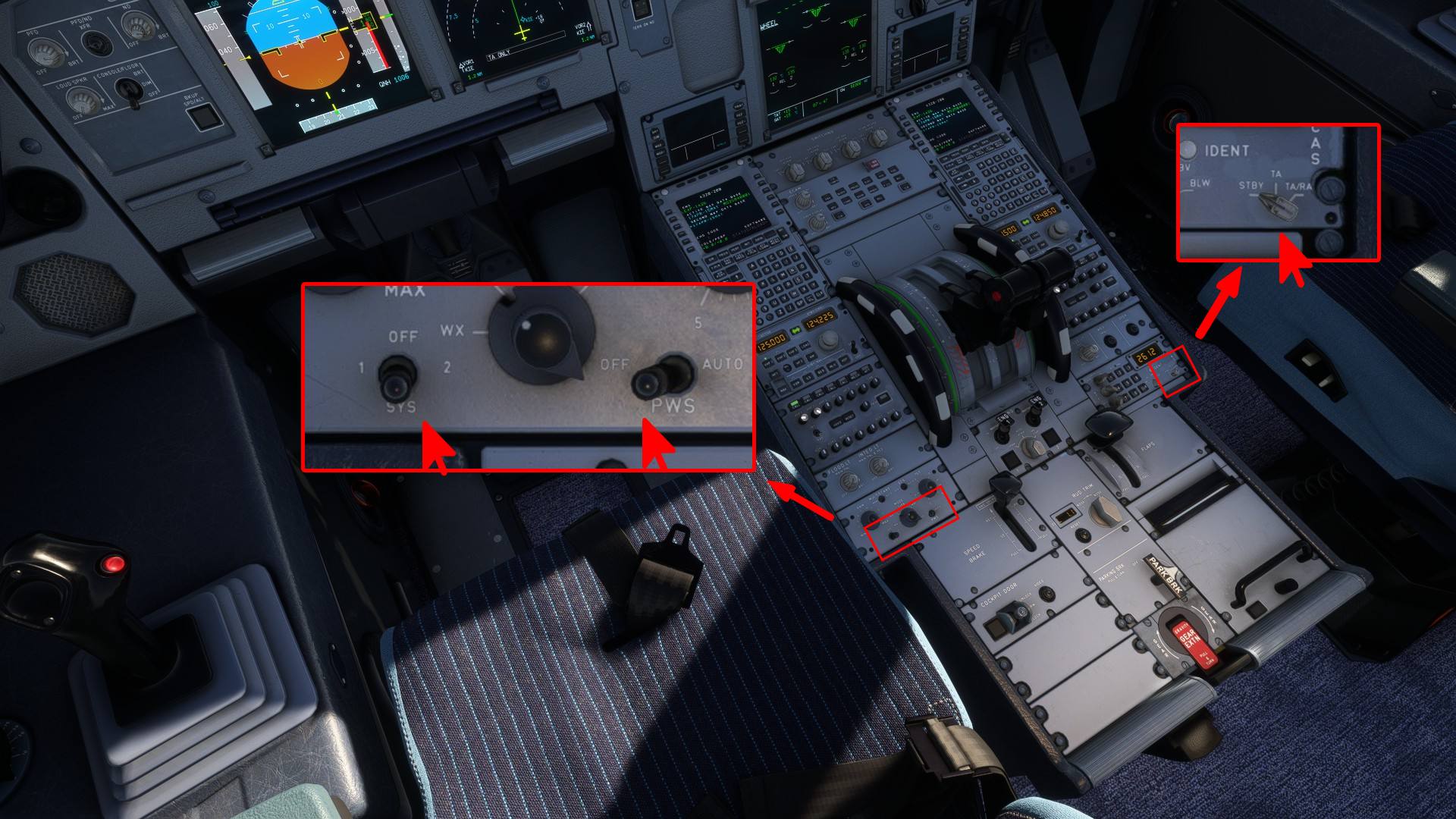
トランスポンダーを 「AUTO」、モードは「TA」(警告のみ)へ設定します。
トランスポンダーは他機からの問い合わせに対して自機の情報(高度、識別番号など)を返信する装置、TCASは衝突防止装置です。

③ウェザーレーダとウインドシア警報の設定
「ウェザーレーダーシステム」を「1(機長側で有効)」、「 PWS(Pred.Windshear:ウインドシア警報)」を「AUTO」にします。

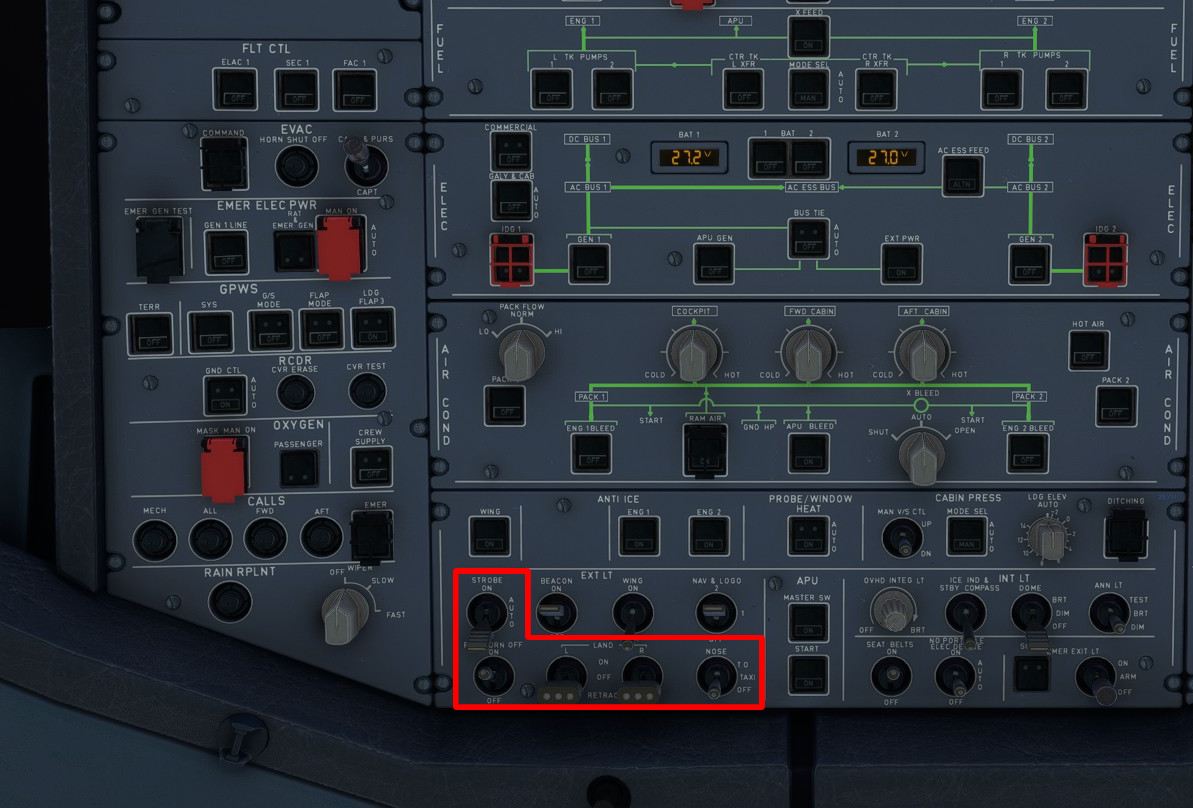
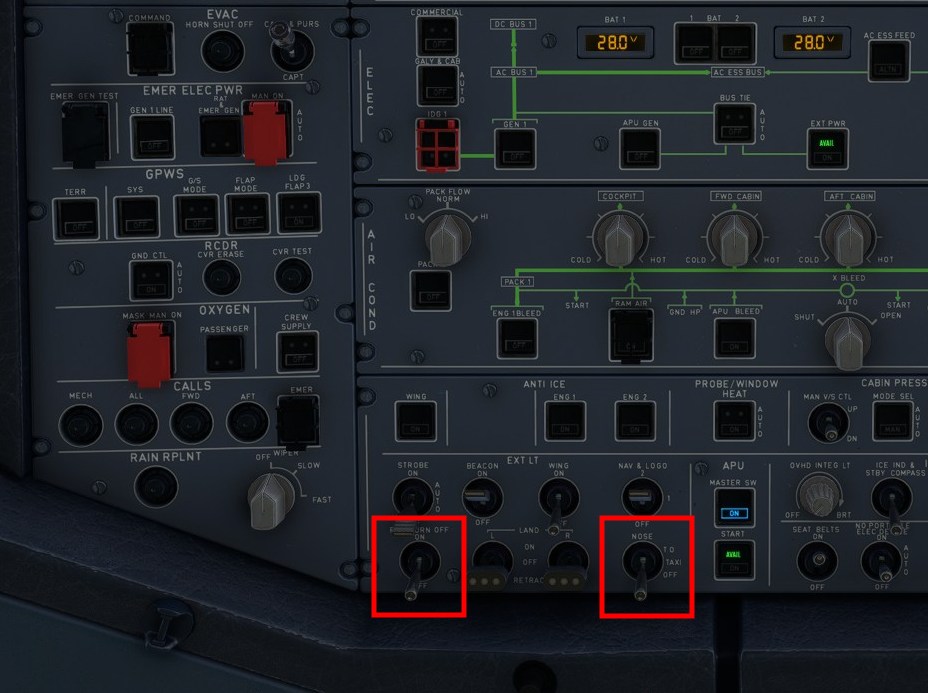
④ ライト設定(離陸灯)
離陸用に以下のライトを点灯させます。
「Nose (ノーズライト)」を「T.O (TAKEOFF)」
「LAND (着陸灯)」を「ON」
「STROBO (ストロボライト) を「ON」

3.離陸
いよいよ離陸です。滑走路のセンターに合わせてパーキングブレーキをセットします。

スロットルをN1が50%くらいになるまで上げます。

パーキングブレーキを解除して、スロットルを「FLX/MCT」まで上げます。※くぼみを「FLX/MCT」に合わせる

スピードがVR速度(速度計の[1]表示)を超えたら機首を10~15°まで上げます。

上昇したらギアを上げます。※キーボードの「G」キーでも可

緑色の線にピッチを合わせて上昇します。

高度500フィートを超えたらオートパイロットを「ON」にします。

PFD上部に「LVR CLB」と表示されたら、スロットルを「CL」まで下げます。※くぼみを「CL」に合わせる


速度計の「S」を超えたらフラップを格納します。

あらかじめMCDUで設定した速度、高度、経路に従ってオートパイロットにより飛行してくれます。

上昇しながら博多の街を後にて南西方向へ飛行します。

4.上昇
「TCAS(衝突防止装置)」のモードを「TA/RA」(上昇・降下など回避行動の指示あり)へ設定します。

「Terrain on ND」(地形表示)を「OFF」にします。

高度10.000フィートを超えたら高度計(Altimeter)を標準(STD)に設定します。飛行機の高度計は気圧を基に測定しまが、出発前に設定した各空港ごとの異なる高度のままだと航空機同士でずれが生じてしまうので、一定の高度を超えたら「標準気圧(STD)」にします。
こちらのスイッチの下を押します。表記が「Std」になります。

「RWY Turn Off Lights」「Nose (ノーズライト)」「LAND (着陸灯)」を「OFF」にします。
5.巡行と降下準備
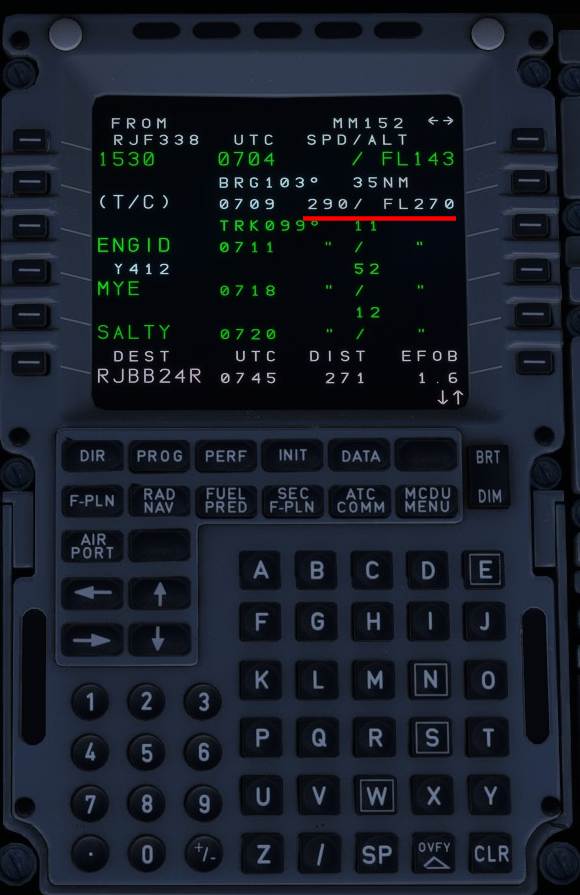
ND(ナビゲーション・ディスプレイ)を確認するとWaypoint(通過ポイント)と巡航高度到達予想地点が表示されています。
※ENGIDが通過ポイント、その下にある青い矢印が巡航高度に到達する地点です。

こちらのスイッチで縮尺を変えることができます。

MCDUの「F-PLN」を確認すると通過ポイントと速度、高度が表示されています。
T/CはTop of Climb(トップ・オブ・クライム)で巡航高度に到達する地点です。
巡航高度に到達すると上昇が止まります。操縦はオートパイロットに任せて景色を楽しみましょう。愛媛県の松山市上空です。

しばらくすると降下開始のサイン「TOD(Top of Descentの略で降下開始地点)」が見えてきます。以下のマークです。降下前の準備をします。

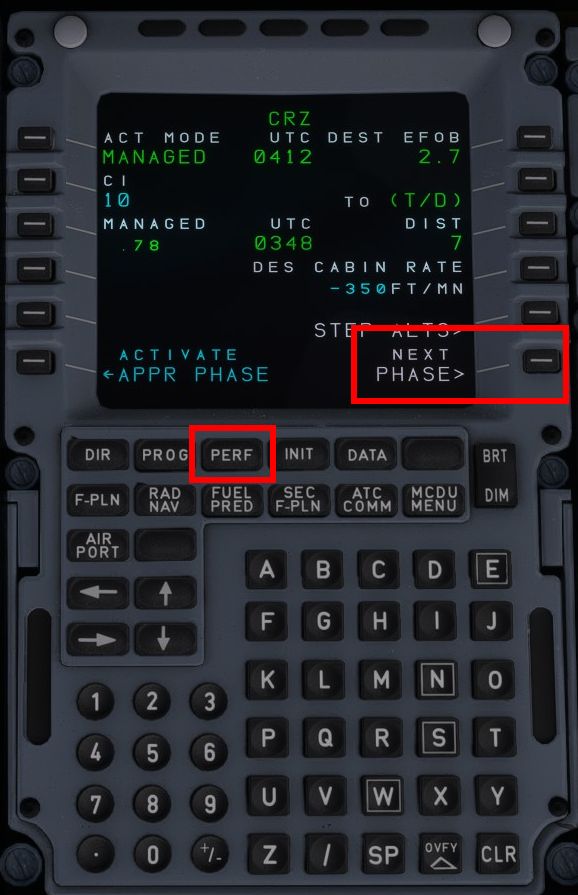
①MCDUの設定
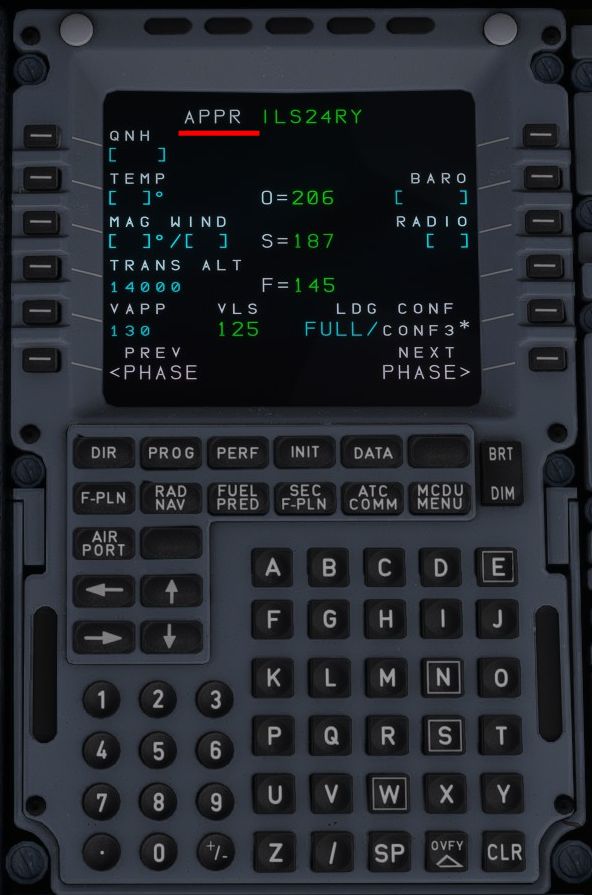
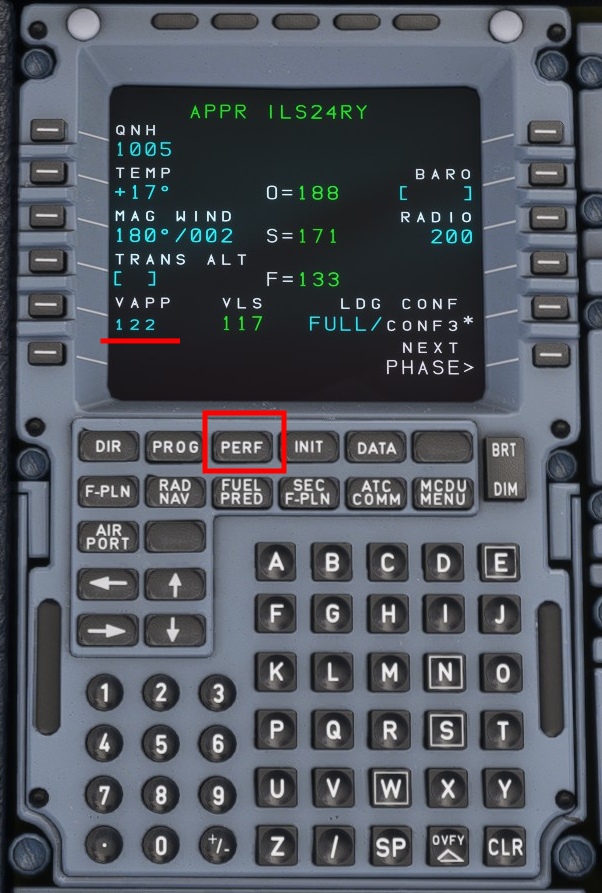
「PERF」ー「NEXT PHASE」ボタンを数回押し、APPR(アプローチ)ページを開きます。
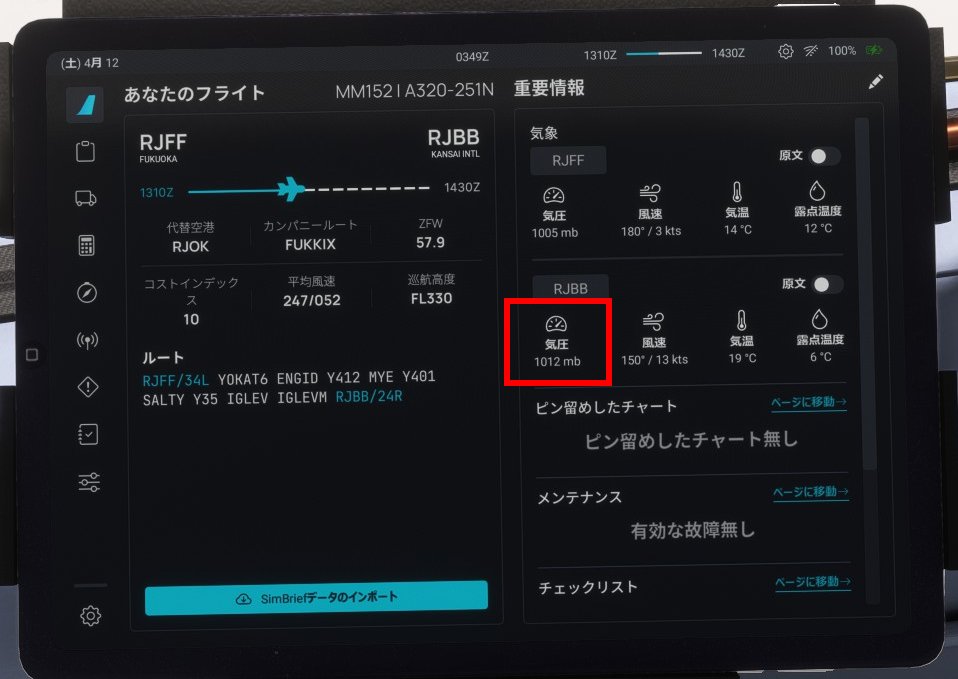
EFBで到着空港の「気圧」「風速」「気温」を確認します。
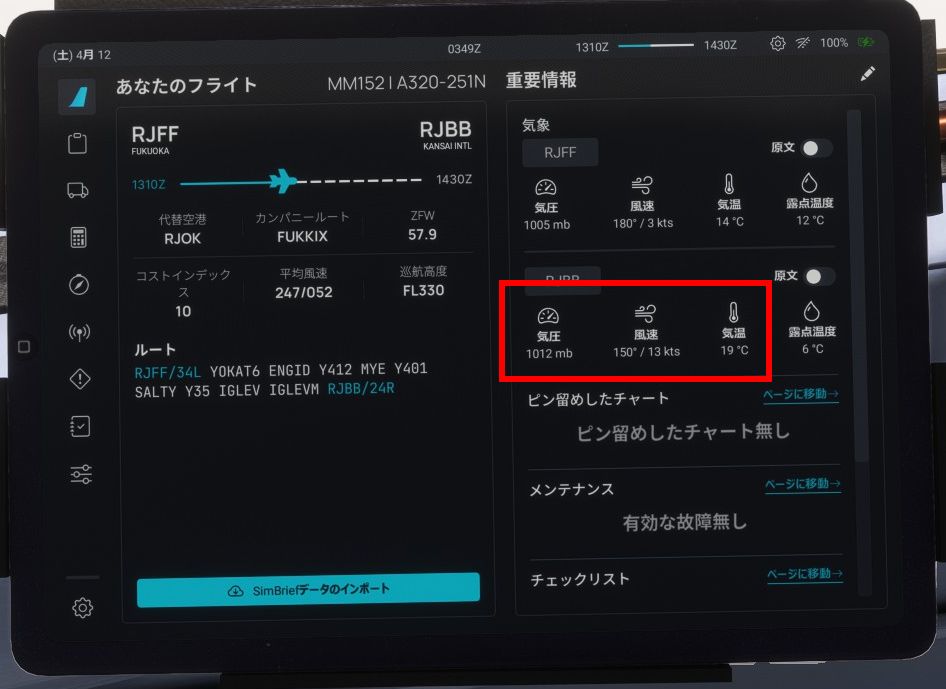
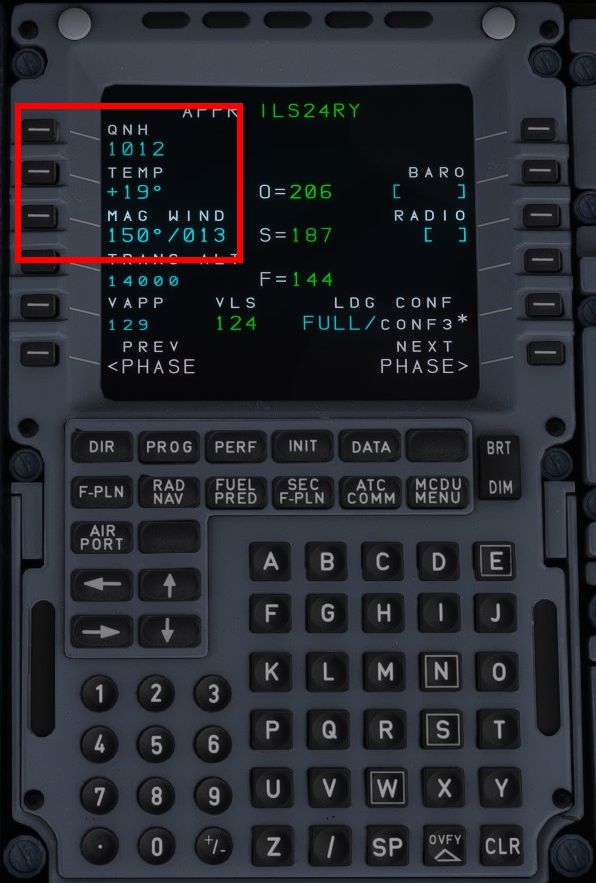
確認した値をMCDUの以下へそれぞれ入力します。
QNH(気圧) ← 気圧
TEMP(気温) ← 気温
MAG WIND(風向き 風速) ← 風速(風向き/風速)
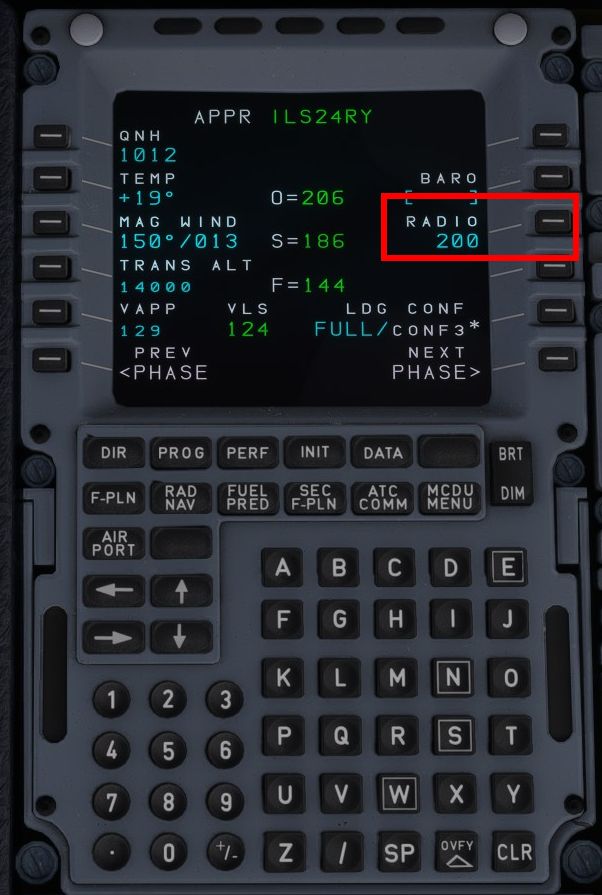
BAROまたはRADIOミニマム(ミニマム決心高度)を入力します。
チャートを確認して入力しますが、わからなければRADIOで200ftを設定します。
②オートブレーキ設定
AUTO BRK(オートブレーキ)を「MED」へ設定します。

③到達高度の設定
MCDUのフライトプランから、到着滑走路のひとつ前のWayポイントの高度を確認します。
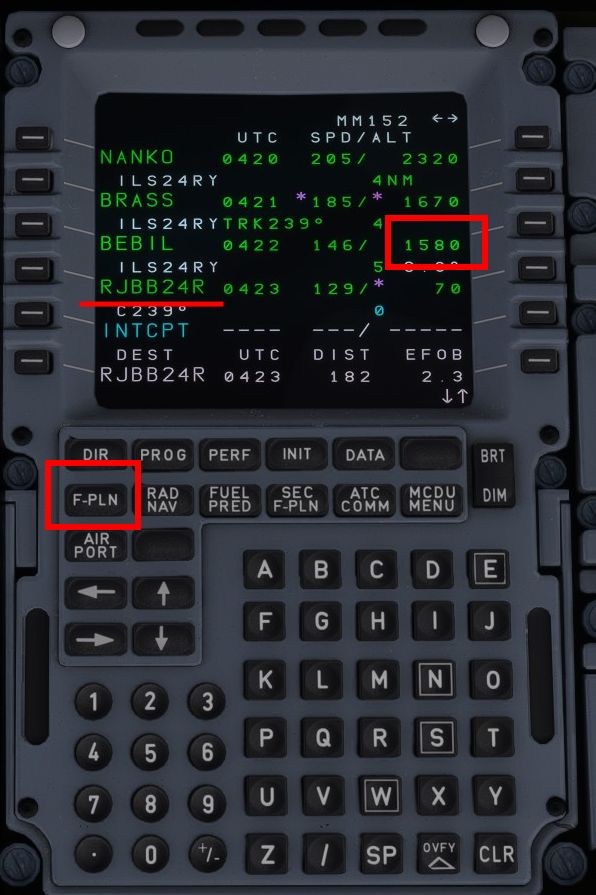
確認した高度へ合わせます。奥のスイッチを切り替えることで変更する単位を1000か100へ変更できます。
※10の単位は切り下げます。

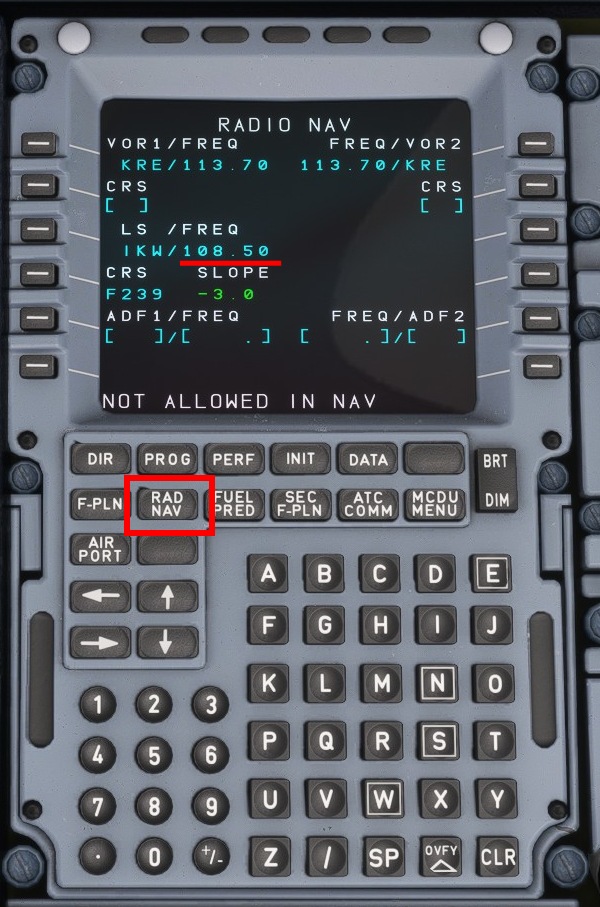
④ILSの確認
MCDUの「RAD NAV」を選択し、関西空港24RのILS周波数(108.50)が入力されていることを確認します。
ILSの調べ方と入力方法はこちらの記事を参考にしてください。
6.降下
TODに近づいたら高度ノブを上へ押します。
※ボーイング機はTODになると自動で降下を開始しますがエアバス機は自分で降下開始を実行する必要があります。

降下が始まります。
高度表示にある「グリーンの●」はFMS(フライト・マネジメント・システム)で計算された降下経路に対して、機体が上にいるのか、下にいるのか、一致しているかを表します。下図のように中心より下にある場合は機体の高度が高すぎるということです。この場合はしばらく様子を見て中心にならないようであればスピードブレーキを使用して速度を落として降下率を上げます。中心より上にある場合は機体が低すぎるということです。この場合はしばらくするとオートパイロットが調整してくれます。
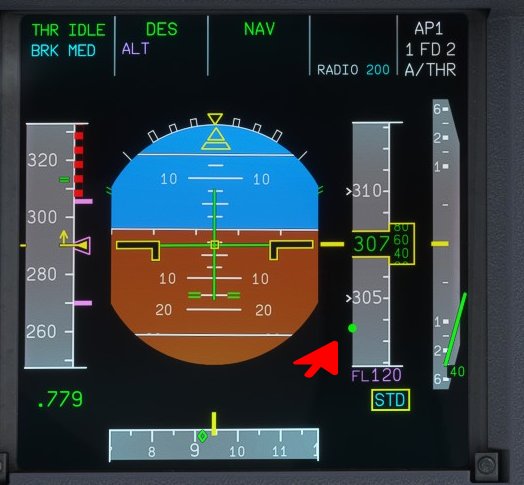
速度も重要です。速度計に表示される紫色の△が計算された推奨速度です。こちらも下図のように中心より下にある場合は機体の速度が速すぎるということです。この場合はしばらく様子を見て中心にならないようであればスピードブレーキを使用して速度を落とします。

高度も速度も中心にあるので、予定の速度で、降下計画に沿った降下ができています。

機体は徳島県を流れる一級河川である吉野川に沿って東へ飛行しています。

7.降下(10,000フィート以下)
高度10,000フィートになったら以下の操作を実行します。
① ライト点灯
以下のライトを点灯させます。
「Nose (ノーズライト)」を「T.O (TAKEOFF)」
「LAND (着陸灯)」を「ON」
② 地形表示の設定
「Terrain on ND」(地形表示)をONにします。

③ 高度計の設定
高度計(Altimeter)をローカル(QNH)に設定します。EFBで到着空港の「気圧」を確認し、高度計へ入力します。
こちらのスイッチの上を押して、単位が[hPa]となっていることを確認してノブを回して設定します。

機体は鳴門海峡を超えて淡路島へ入ります。

8.減速とアプローチ
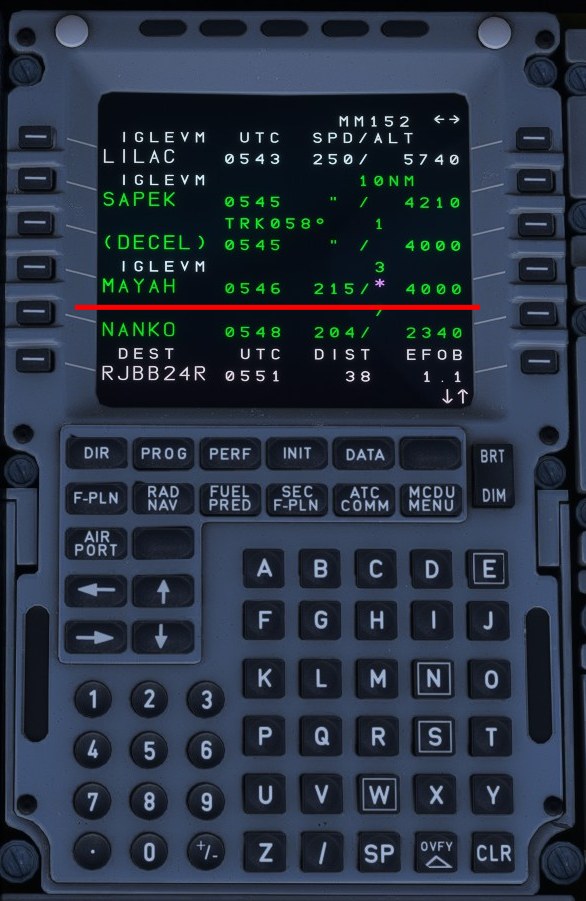
正面に神戸空港が見えてきました。神戸空港のすぐ南が「MAYAH」というWaypointです。

MCDUを確認するとMAYAHの通過高度が4000フィートであることがわかります。順調に高度を下げていればMAYAHを4000フィートで通過できます。
左手に本州と淡路島を結ぶ明石海峡大橋が見えます。

神戸空港のすぐ南で、MAYAHを4000フィートで通過すると右へ旋回が始まります。

FMS(フライト・マネジメント・システム)に従って高度と速度が落ちます。
速度が速度計のグリーンの〇になったらフラップを1まで展開します。

「S」になったら2まで展開します。

ILSキャプチャの準備をします。
「LS」をONにします。計器を確認すると紫色の表示が増えます。これが受信したILSです。

ギアを下ろします。コックピットの「ランディングギア・レバー」を下ろすか、キーボードの「G」を押します。

速度が160kノットくらいでフラップ3、グリーンの「F」になったらフラップを全て展開します。

フラップの状態はこちらで確認できます。

スポイラーは「ARM」にしておきます。レバーを引っ張った状態が「ARM」です。
{kind=link}

速度は最終着陸速度まで減速しました。機体がBRASSに向けて旋回を始めたらオートパイロットの「ARP」(アプローチモード)を「ON」にします。


PFDの上部に「G/S」「LOC」が表示されます。

9.ILSキャプチャ
「BRASS」で滑走路方向へ旋回します。滑走路24Rへ向けて最後のターンです。

旋回が始まると「NAV」の表示が消えて「LOC」だけになります。今まではFMS(フライト・マネジメント・システム)に入力したコースに従って飛行(LNAV)していましたが、「ローカライザ(ILSの左右方向の信号)」をキャプチャし、滑走路への進入コースへ機体が誘導されます。
ILSについてはこちらの記事も参考にしてください。

高度1500フィートを維持して飛行していまが、しばらくすると紫色の◇が上から降りてきます。

中央付近になると「ALT」の表示が消えて「G/S」だけになります。今まではFMS(フライト・マネジメント・システム)で計算された各ポイントの通過高度、制限高度に従って高度がコントロールされていましたが、「グライドスロープ(ILSの垂直方向の信号)」をキャプチャし、機体はILSに従って滑走路まで自動で降下します。

紫色の◇が左右(方向)、上下(高度)のずれをそれぞれ表しています。手動操縦の場合は、ずれがないように機体をコントロールしますが、現在は自動操縦のアプローチモードを有効にしているので自動で調整して滑走路へ誘導されます。

最終の着陸態勢です。

10.着陸
高度が1000フィートを下回ったらオートパイロットを「オフ」にします。FCUの「AP(オートパイロット)」ボタンかジョイスティックの赤いボタンを押します。


ILSの計器と、窓からの景色を見ながら機体を滑走路へ誘導していきます。速度はオートスロットルで一定に保たれているので、機首の上下左右で微調整します。滑走路近くまで自動操縦で誘導されていたので、少しずつ調整します。大きくコントロールするとずれてしまいます。

目指す設置点は滑走路にある白くて太い線です。ここを目指して降下していきます。

接地点の隣に「PAPI」という灯火があります。適正な進入角度(高度)を教えてくれます。
白2,赤2が見えているのがちょうどいい進入角度、白の数が多く見えると高すぎる、赤の数が多く見えると低すぎる状態です。

高度30フィートになったら、エンジン出力をゼロ(アイドル)[F1キー]にします。同時に接地の衝撃を抑えるために機首を少し上げて、降下率を下げて滑走路へ接地させます。この接地直前の機首上げをフレアといいますが、タイミングが難しいです。機種によっても特性があるので練習あるのみです。

滑走路に接地すると、自動でスポイラーが展開されます。「F2」キー(エンジン出力減少)を押し続けると、逆噴射がかかります。

速度が50ノットくらいになったら、「F1」キーでエンジン出力をゼロ(アイドル)にして ブレーキで速度を緩めて誘導路へ出ます。

11.着陸後の操作
誘導路へ出たら、駐機場へ向かいながら以下の操作を実行します。※慣れるまでは誘導路へ停止して実行してもOKです。
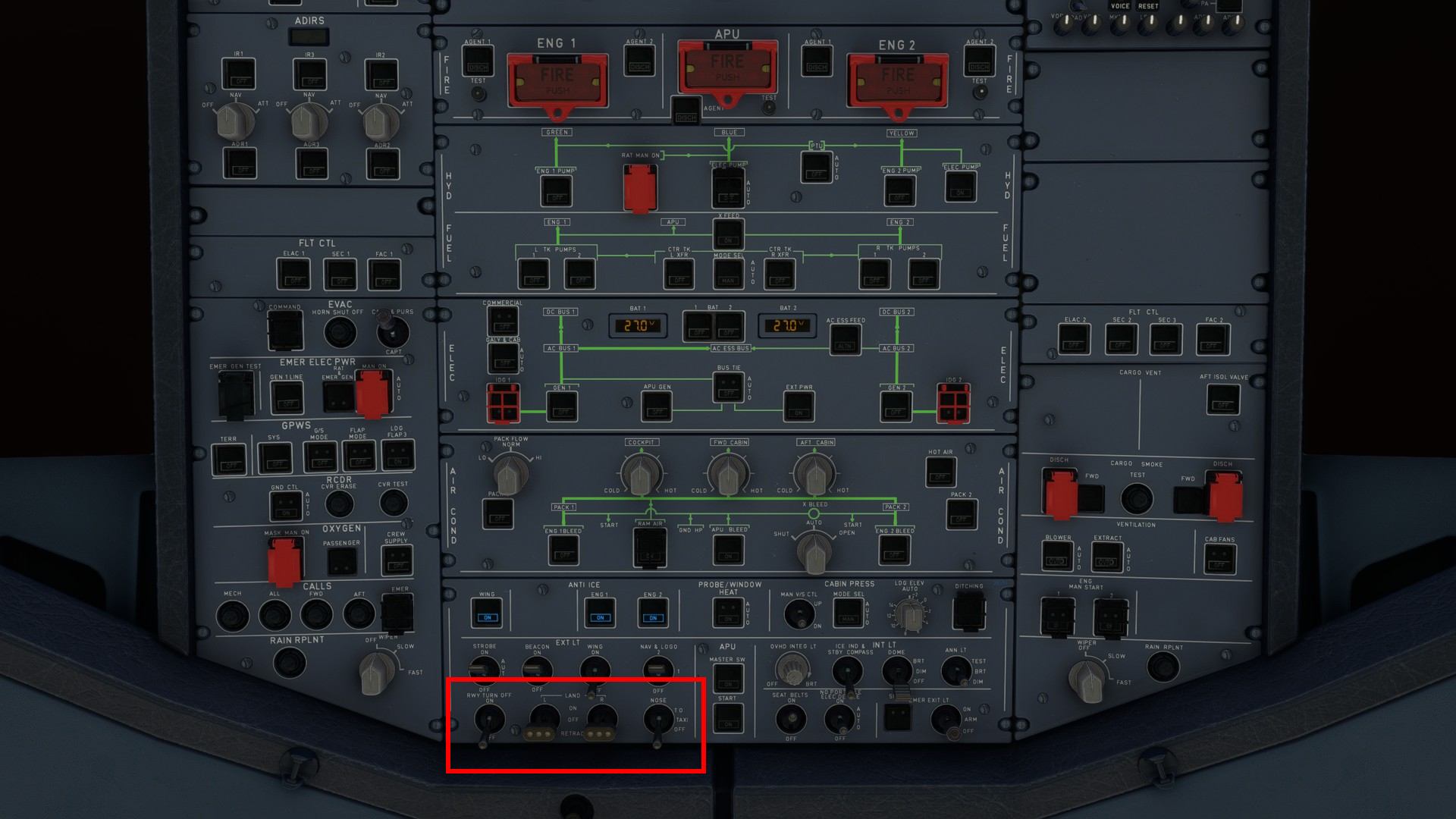
①ライトの消灯と点灯
「Strobe Lights(ストロボライト)」を「OFF」
「RWY Turn Off Lights」を「ON」
「LAND (着陸灯)」を「OFF」
「NoseLights」を「TAXI」
②フラップとスポイラーの格納
フラップを格納(F5キー)、スポイラーを格納(押し込んで白いリボンが見えない状態)します。
③レーダー系の停止
「Terrain on ND」(地形表示)を「OFF」にします。

「ウェザーレーダーシステム」を「OFF」、「 PWS(Pred.Windshear:ウインドシア警報)」をOFFに
「トランスポンダー」を 「STBY(スタンバイ)」にします。
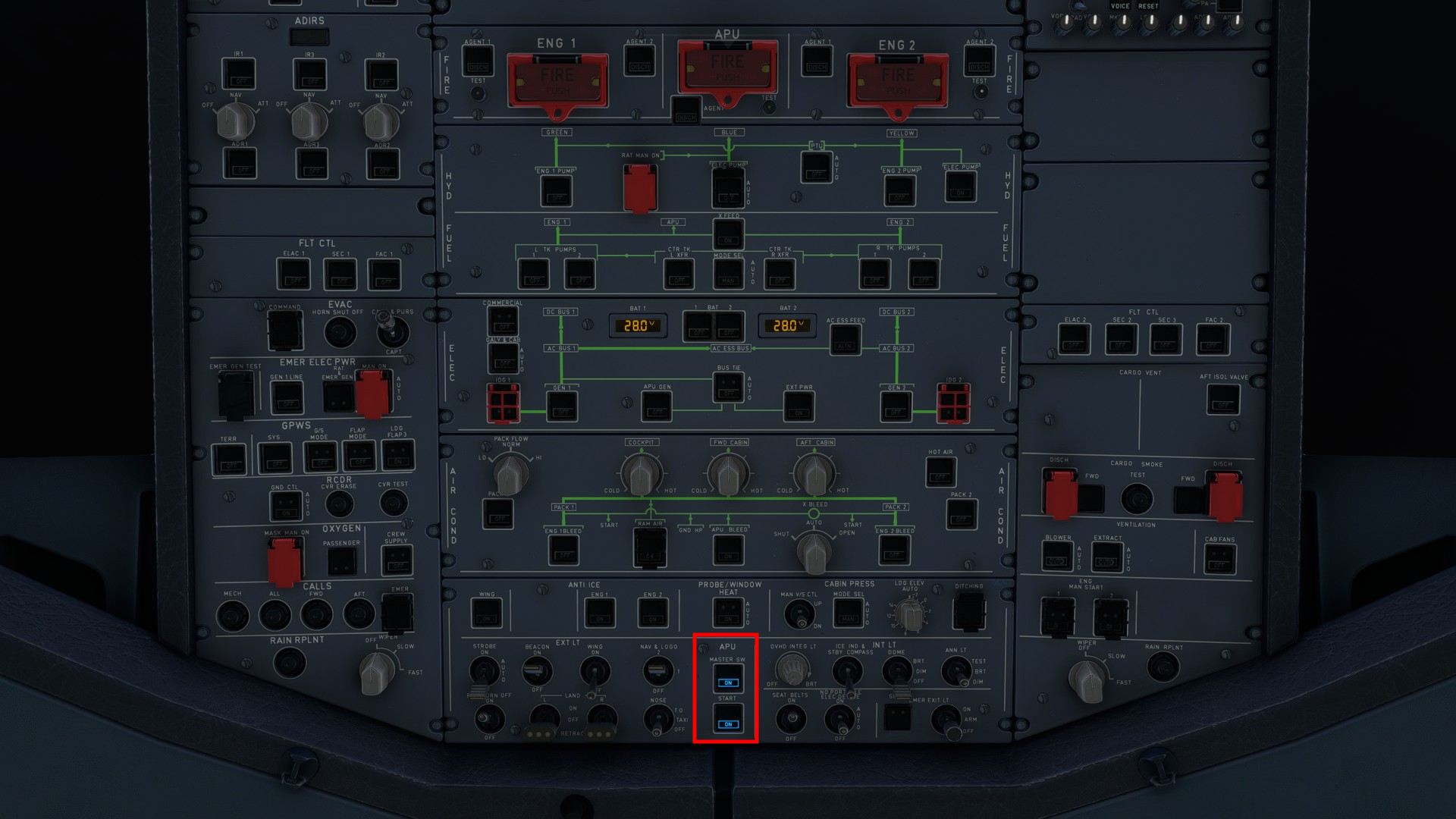
④APUの起動
ゲートに到着してエンジン停止後も、機内照明、空調を維持するための電源を確保するためにAPUを起動します。
「APU MASTER SW」を「ON」にします。続いて「START」を「ON」 にします。
12.エンジン停止
ゲートに到着したら、パーキングブレーキをセットします。

・「NoseLights」を「OFF」、「RWY Turn Off Lights」を「OFF」にします。
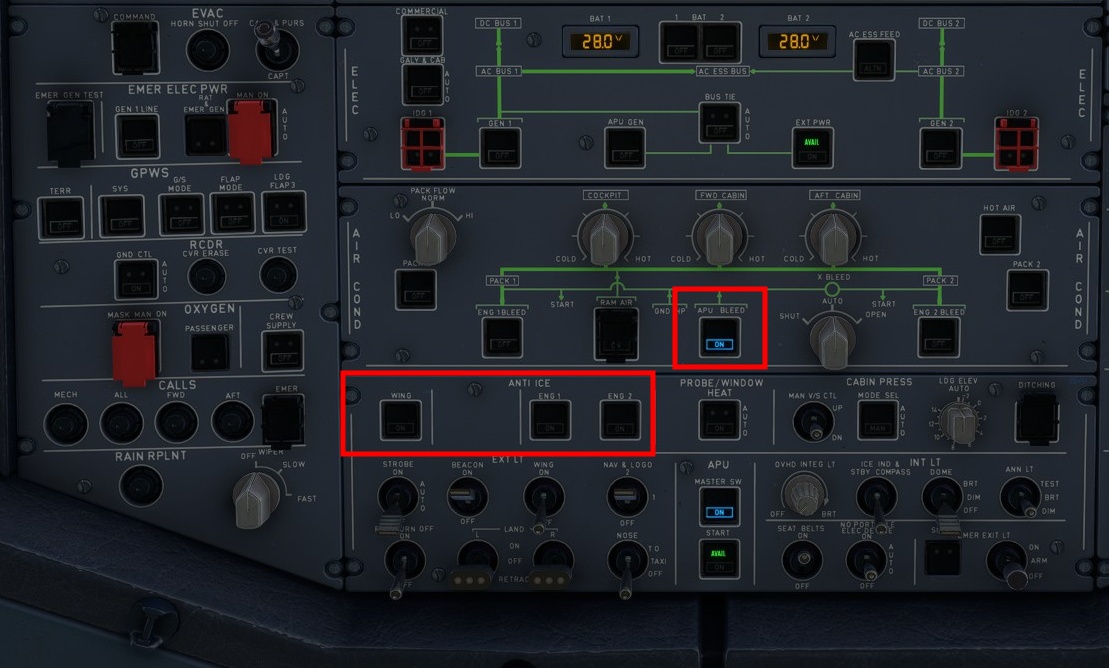
・「Engine Wing Anti-Ice」「Wing Anti-Ice」(エンジンと翼の氷結防止)をOFF
・「APU BLEED」を「ON」 にします。
・「ENG 1/2 Master Switch」を「OFF」(下へ)にします。これでエンジンが停止します。

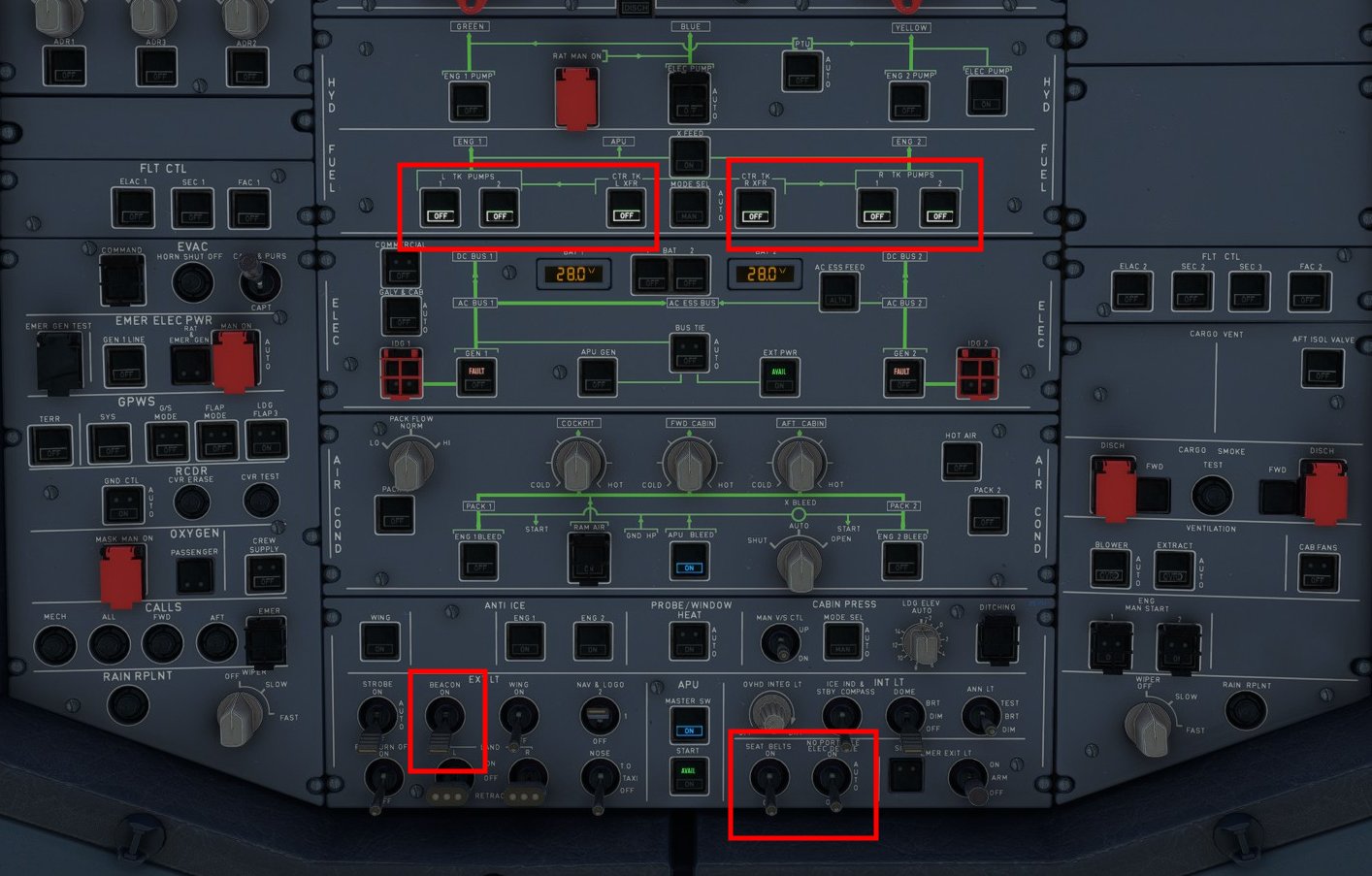
・「Fuel Pumps」(燃料ポンプ)をすべて「OFF」にします。
・「Seat Belt Signs」(シートベルト)を「OFF」、「NO PORTABLE ELEC DEVICE」(ポータブル電子機器使用禁止)を「OFF」にします。
・「BEACON LIGHT」を「OFF」にします。
以上で操作は完了です。操縦お疲れさまでした。

補足.速度の指定(マネージドモードとセレクレッドモード)
今回は離陸から、降下、着陸までを全てFMS(フライト・マネジメント・システム)で計算された速度、指定した経路に従って飛行していました。これを「マネージドモード(Managed Mode)」と言います。
FCUの速度、針路、高度それぞれについて「●」が表示されていれば「マネージドモード(Managed Mode)」です。

降下中に他機との接近を防いだり、管制の指示に従って速度を調整することがあります。その場合は指定した速度へ変更することができます。
FCUの速度指定ノブを回して速度を指定したら、同じノブの「下」をクリックして「Selected(セレクテッドモード)」を有効にします。

これにより指定した速度で降下することができます。着陸速度はMCDUのPERFでVAPP(着陸速度)を確認可能です。
オートパイロットについてはこちらの記事も参考にしてください。
コメント